9401 counting by quadrature encoder error
I use a 9401 module in a chassis 9188 to measure the position of a tree in 1E6 County/rev. The signal is an AQuadB emulated from an AKD Kollmorgen servo drive. My problem is that when the player is turned on, the noise it makes picked up as very positive figures by the 9401. The player has outputs RS485 but my cable length is short and well armored, so I thought it would work very well. It is wired like this:
9401 CTR1 channel
A +: 9401 pin 20
B +: 9401 pin 23
GND: 9401 commune
The cable shield: 9401 commune
Is this product because the encoder signal is differential, or is my bet to the ground/shield OK? If I disable the encoder entirely the 9401 picks up a zero solid. Should I use a kind of RS485 converter to TTL?
In addition to the advice of John to help protect against digital noise, I also recommend that it would be a good idea to convert the differential asymmetric TTL formally. I had opportunities in the past where I had an ambivalent connection channel differential encoder of 5V to a DAQ card and often, it would work properly. But there have also been moments where differential signals (-) were trying to drift over the other while being tied to the digital earth common DAQ, causing sporadic but strange counting behaviors. At least that's the diagnosis I'm come up with at the time.
These questions disappeared immediately and permanently after putting in a differential to the TTL converter. Here is a link to the productI used (and then successfully reused on the following projects). Just check the specifications of your particular differential signals compared to what this product is to spec'ed to manage.
-Kevin P
Tags: NI Hardware
Similar Questions
-
Erratic counting quadrature encoder
Hello
I try to use LabVIEW 9.0 and an acquisition of data USB-6212 for measuring angular displacement of rotating quadrature encoder (digital model we E2) attached to a linear actuator based on the stepper motors.
With the help of the VI linked to below and the default PFI pin on the acquisition of data, I can get the Angle of the VI to change, but with two issues indicator.
http://forums.NI.com/attachments/NI/170/144774/1/QuadratureEncoderM-series.VI
1. the only way I can assure you that the Angle indicator remains at a constant value with the VI running and the stepper motor moves do not is to turn off the power to the encoder. In other words, when the 5V power is provided to the encoder, the Angle indicator sometimes remains constant at a certain value and sometimes increases, even if the motor step does not move. I added a waveform table that displays the Angle to see more easy output.
2. with the engine not to not pass any if she moves hourly or counterclockwise, the angle indicator only increases (counting). Changing the direction of engine displacement does not decrease the angle.
I checked the DAQ pins I use: PFI 3, Z = A = B = 11 PFI with ctr and PFI 4 1. I tried both ctr0 and ctr1 with the same results. I used a multimeter to check the outputs a, B and Z on the encoder to output with the motor step-by-step to displacements of various populations, and I'm getting ~ + 5V sometimes and ~ 0V sometimes telling me that the encoder, which is new, seems to move from high to low.
This sounds like the kind of behavior that may be caused by noise in signals? If so, who should not have something to do with the Angle only, correct? To get the Angle to reduce, should I change something in VI?
I thank you very much for any assistance, you can give.
Hi Mike,.
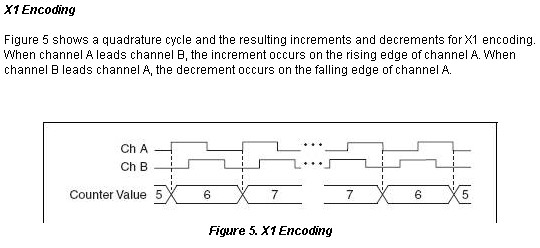
From what you describe, I feel the symptom of the meter backwards never is a side effect of the issue where the meter continuously counts up while in not moving. This really looks like a noise problem, and there are a few small but noticeable spikes in your graphics HAVE you provided. Basically, as long the (Source) Signal led B Signal (to THE), then the meter progressive count. This is for X 1 coding, which I assume that you are using. Look here Figure 5, in virtue of the X 1 section for how this encoding reads your signals of encoding:
Your connections you describe are correct, so it'll be a matter of getting rid of the problem where the meter is incremented on its own which I believe will solve your other problems. Take a look at these links to see if adding filters on the internal counter inputs to the card allows the measurement: Activate the digital M series filtering allowing digital filters for TIO Debounce NOR-DAQmx devices
-
VI quadrature encoder does not work after programming of FPGA
I'm rather new on the MyRIO, and I work on the motor of the MyRIO and read control in a quadrature encoder at the same time. Programmed individually, the two pieces of work at Marvel, but once I have combine them and try programming, control of motors not to not work signals, but the reader encoder does not work. I use the Express VI for the LabVIEW quadrature encoder reader, and I produce four stepper motors signals using FPGA.
It seems as if the encoder is disabled when I program the FPGA with my code, because if I have two parallel loops, one for the reader encoder and the control of step motors, if I stop the loop of step motors, the encoder works immediately.
Is there something simple that I'm missing? Any suggestions would be greatly appreciated!
Thank you
Enan
I realize now that my last answer could have been confused and not useful to someone else who may come across the same problems later.
Here is how I solved the problem I've had:
I had to derive Boolean expressions for an encoder quadrature (essentially to create my own) and then used the outputs (UP, DOWN) to increment/decrement a counter using the conditional statements. Then, I stored the value of direction in a flip flop implemented using two conditional statements of T/F in series and connected to a shift on the edge of the loop register.
It was all able to be implemented in a single cycle timed Loop, and then I managed to place in the same loop that I used to control stepper motor.
In this way, I could have a VI collected in a Bitfile and could be programmed to the FPGA.
Hope this is clearer!
Enan
-
quadrature encoder synchronize the sample
Using a USB-6251 housing measure a quadrature encoder, I will determine the angle that external discrete changes state. I tried to connect the unobtrusive to a DIO of entry and using code CVI PC read the angle of the encoder, when the state change occurs. The problem is the lag time of the PC code that adds up to 4 degrees (with a variability) to the measured angle. An ideal solution would be to trigger a measure in a buffer in the USB-6251 housing when the State of the discrete changes, then read the value in the PC at a later date. Is this possible with the USB-6251 housing?
Thanks Adam,.
I solved my problem by using this idea with the addition of the use of sampling buffered and discreet as a trigger. Engaging the material task also seems to be a good idea, but may not be required.
The installation code looks like this:
Start a way to encode on the counter 1 to control the angle of the label sensor PNP edges
status = DAQmxCreateTask ("PNP Rising edges", & pnpTaskHandle);strcpy (chanString, devName);
strcat (chanString, "/ ctr1 ');status = DAQmxCreateCIAngEncoderChan (pnpTaskHandle, chanString, "", DAQmx_Val_X4, 1, 0, DAQmx_Val_AHighBHigh)
DAQmx_Val_Degrees, 4096, 0,0, "");
sprintf (chanString, "/");
strcat (chanString, devName);
strcat (chanString, "/ PFI1");
status = DAQmxCfgSampClkTiming (pnpTaskHandle, chanString, 1000000, DAQmx_Val_Rising, DAQmx_Val_ContSamps, 10)(0000);
If (status<>
DAQmxGetErrorString (status, errString, 1000);
DAQmxTaskControl (pnpTaskHandle, DAQmx_Val_Task_Commit);
Start the task
status = DAQmxStartTask (pnpTaskHandle);
angleTaskStarted = 1;Read the value of looks like this:
status = DAQmxReadCounterF64 (npnTaskHandle, DAQmx_Val_Auto, 0, npnEdgeArray, 1000, & npnSampsRead, 0);
-
How to read a quadrature encoder, using a PCMCIA card from 6036E?
Hello
I 6036E PCMCIA card and I want to read a quadrature encoder.
I must not use the z index.
My version of Labview is 8.5.
When I try to use the DAQ assistant and choose the option 'angular position' I get the answer that no supported device were found.
What should I do?
Thank you in advance,
Fotios
Hello
Card PCMCIA-6036E has a STC chip that does not support the encoding position because there is no support of Z. It must be resolved in the software and using the edge counting.
Some info on E-cards and quadrature encoding:
http://zone.NI.com/DevZone/CDA/tut/p/ID/4623
http://zone.NI.com/DevZone/CDA/tut/p/ID/2879
http://zone.NI.com/DevZone/CDA/EPD/p/ID/1427
/ Klas
-
I just got a new Dell with the 64 bit version of windows 7 Home premium. I downloaded firefox and it worked perfectly fine. Then after that it updated, it does not work. He will take care of some of my favorites, but not completely. Some sites like youtube load very well. Other sites Web support right or not at all. When they load it displays the content encoding error. Whenever I try to look for something with google, search results never appear. None of the fixes worked troubleshooting.
One possible cause is security software (firewall) that blocks or limits Firefox or plugin-container process without informing you, possibly after the detection of changes (update) for the Firefox program.
Delete all rules for Firefox and the plugin-container in the permissions list in the firewall and leave your firewall again ask permission to get full unlimited access to the internet for Firefox and the plugin-container and the update process.
See:
It does not help if you disable compression of web servers by setting the pref network.http.accept - encoding of an empty string on the topic: config page?
-
Media Encoder: Error compiling Movie - unknown error
As the title, I have problems with Adobe Premiere Pro CC 2014 Adobe Media Encoder CC 2014 and - "Adobe Media Encoder: error compiling Movie - unknown error" appears each time I try to export my video. Both are trial versions, but my Adobe Media Encoder CC 2014 had ended and my Adobe Premiere Pro CC 2014 have left about 1 week of trial. Please help as soon as possible because I have to do a large project for my school, so cannot function without these great apps. Thank you.
Hi Charles,
Have you tried to export with Premiere Pro?
Go to the file Menu in Premiere Pro > project settings > general and change 'Mercury playback engine' (if it allows) to 'Only software Mode' and then try to export from Premiere Pro.
Mention also, what operating system are you using, hard RAM (Exxternal or internal), or several installed graphics cards and formats of files used in the project.
Have you tried to make the scenario first before export?
If possible send a screenshot of the full timeline.
Vinay
-
Using more 4 for MyRIO quadrature encoder inputs
Hello
I am doing a project where I need to drive 6 motors, each with feedback from encoder quadrature to control the position.
Currently, I use the VI MyRIO encoder, but there is a limit to 4 encoders. What is the best way to read 6 encoders simultaneously with the MyRIO?
Thank you
Timothy
If you must change the FPGA myRIO personality you have a few options.
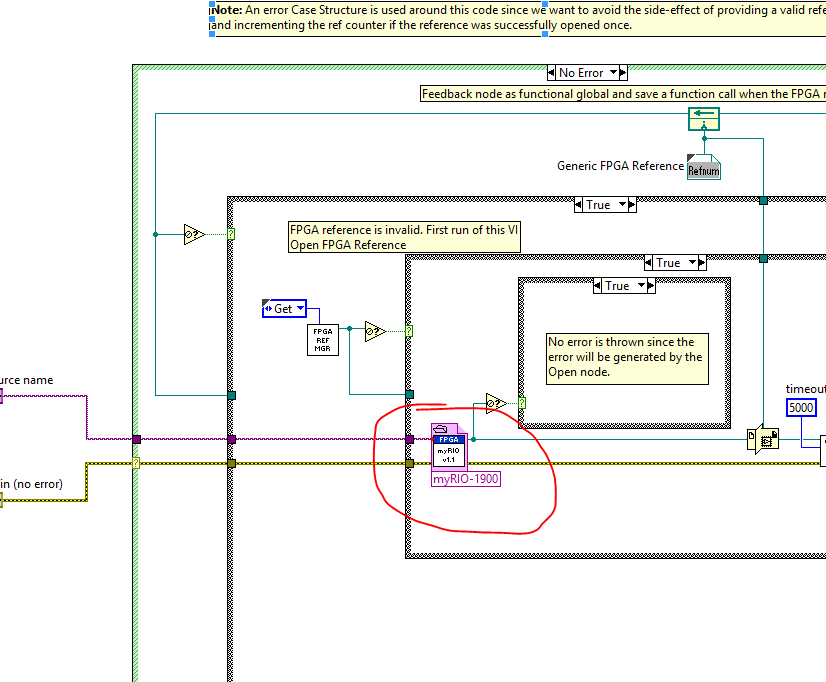
The best option is to start with the FPGA myRIO sample project, add and delete components according to the needs and then build your bitfile. No registry (LV FPGA control / indicators) you do not change will still work with the Advanced IO screws and screw Express. To use the new bitfile (FPGA personality) you must update the Reference of VI FPGA opened in myRIO Open.vi v1.1 (LabVIEW 2013\vi.lib\myRIO\Common\Instrument Driver Framework\myRIO v1.0\myRIO v1.1 Open.vi).
After having done all this time, you use an Express VI myRIO or Advanced IO VI it will use your custom bitfile. All peripheral channels that you left in place will continue to work. You have deleted all channels will always appear in the screws, but will not work (they will probably throw errors when running) and all new channels that you added appear in the screw . New channels, you will need to use FPGA read / write nodes for read and write configuration data and register you created in the FPGA personality. These changes will persist on this computer until you change the Reference of VI open FPGA to the bitfile original.
Let us know if you have any questions about all of this.
Thank you!
-Sam K
Join us / follow theGroup of pirates of LabVIEW on google +
-
Quadrature encoder frequency division dotNet VB Net c#
Hello
After a long search on this forum, I decided to start this thread for dotNet developer.
I have a PCI-6602 with an encoder in quadrature (A, B, Z). The frequency of the pulses is average (10 kHz).
I'm only using the channels A and B.
The function I need to implement is to output all N pulses forward. N is a natural number and ranging from 1 to say 100.
I have no constraints on the output. I may be a little switch or a generation of impulses.
What features I'll call in MeasurementStudio.Net to implement this?
How many counters should I use?
On the registry, my guess is that I have to preload a value in the registry.
Then when countdown counter reaches 0 this in turn does 2 things:
- reload its set value meter
- triggers the generation of output (TerminalCount)
Thanks for any help you can provide

Guy nOTEs for EITHER:
---------------------------------
Moreover, in samples of NOR, squaring does work all the way. I NLE sample "CountDigEvents" with CountDirection the 'Externally controlled' value, backward motion is never displayed. This is because the meter is read as a UInt32.
Hi anthony75fr,
Although there is no support for A, B and Z entries, the behavior you're looking for is essentially how a counter output tasks works. Wouldn't not enough output on each pulse signal of A N (ignoring B and Z)?
If so, you can configure it with only one meter by making a simple change to the example of GenDigPulseTrain_Continuous. The basic shipping example uses the CreatePulseChannelFrequency method. You want to use the CreatePulseChannelTicks method to specify your low and high time regarding ticks of the external signal (regardless of the PFI line the A out of your encoder is connected to). By default, the output of the meter will switch between high and low in a way the number of ticks high and low ticks that you specify (for example, you can set up the meter for the output up 2 ticks and low for 98 ticks, giving a boost all 100 ticks - 2 is the minimum value for high or low ticks).
Best regards
-
cDAQ-9178 & NI 9401 - ASM: incremental Rotary encoder works is not beyond a certain frequency
I use a chassis with a NI 9401 DIO module 9178 cDAQ. I'm trying to convert the output of a rotary incremental encoder ASM (in radians) to rpm.
Sensing head (PMIS4-20-50-240kHz-TTL24V-Z0-2M-S)
Snap ring (PMIR7N-20-50-M-20)
The encoder outputs 2500 pulses per rev (output 5V TTL). The maximum speed which will see the encoder is 2800 rpm, which is equivalent to 2800 RPM * 2500ppr/60 = 116,667.67 Hz in terms of frequency.
Since the NI 9401 of the operations specifications:
Maximum of the input signal switching frequency by the number of input channels, by channel
8 input channels... 9 MHz
4 input channels... 16 MHz
2 input channels... 30 MHzI use only 1 channel, so I'm assuming that the 9401 should be more than capable of handling the 116kHz which the ASM encoder is spit.
Everything works fine until about 2100 RPM (~ 87, 500 Hz) but then I begin to see a drop in rpm, followed by a flattened behavior, then a slight increase. But never more than 2100 RPM. Our test unit is inspected for other reasons at the moment so I can't produce a plot of the behavior (I can reupload later). I think this must be a matter of aliasing with the meter or something of the sort. I have a digital filter set in place with a minimum of 4.0E pulse width - 6. It is two times smaller than the width of minimum pulse at a frequency of 116kHz (0.0000085714). I don't think this should have an impact on the calculation.
Any suggestions? This value of RPM is essential to our application.
Thanks in advance,
-MB
brown_ktr wrote:
I have a digital filter set in place with a minimum of 4.0E pulse width - 6. It is two times smaller than the width of minimum pulse at a frequency of 116kHz (0.0000085714). I don't think this should have an impact on the calculation.
A 116 kHz frequency, the period is ~8.57 us, but the pulse width half duty cycle of 50%. Ascent/descent time factor, and it is quite possible that 4 US is too long for your encoder signal.
The shape of this graph supports this theory, if we consider that there is variation in the exact pulse of each encoder pulse width. The shortest pulse is ignored when the filter starts to kick in, and the speed of ROTATION increases pulses longer and longer are ignored then as well.
Try to decrease the minimum pulse of digital filter (US 2 or even 1 US) width and see how it goes.
Best regards
-
I'm trying to measure rpm of the motor shaft with a proximity sensor and a cDAQ-9174 with NI 9401 module in slot 4. The exit of the proximity sensor passes from 0V to approximately 4.25V. The frequency of measurement should be close to 1 Hz to 500 Hz, I hung the signal to pin 16 and the COM to pin 1. When I select ctr0, the measured value changes radically, as shown in the chart attachd counter image. I checked my signal clinging to a NI 9205 module and using an oscilloscope VI, as shown in the picture as an attachment. It shows exactly what I was waiting for the frequency and amplitude. What could be the problem when you try to use the meter? I have also tried in MAX and get the same strange results.
Thank you
MattHave you tried to use one of the examples? Specifically, could you try material input and output-> DAQmx-> entrance of counter-> meter - reading and frequency (On Demand) .vi pulse width.
-
Hello
I have a cRIO-9014 with a NI9505 DC brushed servo drive module and I would like to program the FPGA to PWM and encoder, quadrature, interfacing using the functions of intellectual property intellectual property mentioned in "CompactRIO Motor Control Basics Tutorial":
DX of encoder quadrature method (FPGA, using SCTL) .vi
Pulse Width Modulation (FPGA, using SCTL) .vi
I did a search at ni.com/ipnet but I could not find them.
Where can I find free downloadable IP cores for the blocks of PWM and encoder to include them in my interface FPGA program?
Thanking you in advance,
Manual
Found by myself (google search!) to:
https://lumen.NI.com/nicif/us/codepowelecguide/content.XHTML
-
I am writing some software encoder test and seem to be getting an error + 0.01 degree by degree. He has up to 360. I use a US Digital AD4 - 8 which returns the hex. Even the out-of-the-box vi that accompanies the AD4 gives the same error. I'm puzzled. Encoders do not have parameters. And I was all over the documentation and do not see anything I might be missing. Ideas? Thanks in advance.
Had to tap into some old code to understand it. Buried deeply, deeply in the old code that blows by turning constant is preparing differently in the way that I do. Let's not my way.
 My value of the constant has been bad. Had to close through the back door... that is why the strange lag... had to dig deep, deep in the old documents to get the correct value.
My value of the constant has been bad. Had to close through the back door... that is why the strange lag... had to dig deep, deep in the old documents to get the correct value. -
Incremental Quadrature encoder
Hello
I use an encoder incremental quadrature.
I ran the position.vi of angular measure in the examples to find > measure angular position.vi
However, I always get the angle between within 360 degrees.
How to obtain the more than 360 degrees (i.e. If the tree goes more than a tour)? I don't want to see after 360 degrees, then it return to 0 degrees. 1 degree etc.
Can someone change the position.vi of angular measure to accommodate the jumps from 360 to 0?
Thank you.
You have the encoder in front of you? Give it a try. Spend some time to learn about the counters and encoders.
You will get no help from me until you demonstrate that you are ready to follow a proper forum etiquette. Don't send personal messages. Two months ago you sent me a personal message and I explained to him that you should rather post on the forum. Yet you did exactly the same thing again today. If I had noticed that you sent me a personal message before posting the same question in the forum, I would not respond at all. Then, when you do not have an immediate response later in the thread, you followed up with another personal message containing exactly the same content. This is not the right way to get help here.
-
Movie maker while encoding error message
I can not burn the movie to DVD + R using Movie Maker. Whenever the selected files are coded, I get an error message to. 8% encoded. I'm using Vaio import files import and am runnign Vista Home premium.
I can not burn the movie to DVD + R using Movie Maker. Whenever the selected files are coded, I get an error message to. 8% encoded. I'm using Vaio import files import and am runnign Vista Home premium.
======================================
I assume you are using Windows DVD Maker?It is possible that your project includes some incompatible
source files or may be too complex... IOW too
transitions, effects, etc...As an experience... try to work with a small simple project.
Several formats are apparently compatible with
Movie Maker, but the most reliable choices are:Photos - bmp
Video - wmv or dv - avi
Music - wma, wav, wmvJohn Inzer - MS - MVP - Digital Media Experience - Notice_This is not tech support_I'm volunteer - Solutions that work for me may not work for you - * proceed at your own risk *.
Maybe you are looking for
-
How will I know if my update of windows is up-to-date
How will I know if my update of windows is up-to-date
-
Capitalize the first letter of a sentence in a Textfield
What is the best way to get a Textfield to behave like those for the first/last name in the addressbook? What I want is a field which: Capitalizes the first letter in uppercase Capitalizes the first letter in uppercase after each point or the dot & s
-
Hello world! I'm setting up a asa 5520 (software Version 8.2 (5)) connection without customer serveral profiles and ACS 5.3 as server authentication, this works well AD users or local can connect vpn without problem, but now I need to show only one (
-
Can I download Adobe DC Pro on my Mac and my PC?
I just bought Adobe DC Pro. I'm not sure how many computers can I download this to. I would like to install on my Mac and my PC. Is this normal?
-
present the adobe Forms button
Is there a way to ensure the send feature (using the interactive button) will work in all browsers? I created optimized PDF forms and submit button works only in Solution Explorer.