cRIO autorun host VI
Hi, I am using a cRIO (9012 + 9102) with LV 8.5, build a project of QA control and data boarded for a hybrid race car. I would like to be able to run this stand-alone without a connected PC. I had my FPGA runs just fine on its own, download the bitfile, load automatically under tension and all that and the FPGA code runs fine without a connected computer. Now I have a host VI on my controller, which stores the data on a USB key. I am fighting to figure out how get the host VI runs automatically, just like the FPGA does, and I begin to feel that it is because you can not do this!
I see in the host VI properties (right click on the host VI > properties) there is a category of execution, where I have the option to select "run opening. It is great, but is there a setting somewhere 'open' the VI whenever the cRIO is turned on? I have a digital built-in switch to turn recording on my USB on and outside, so I can stop writing about a file before deleting the key.
Thanks for your help, I'm probably missing something pretty basic, but I've looked everywhere with all the keywords, I can think.
Jeff
The recommended way to create an application, which begins when a target time starting real LabVIEW, is to build in an executable and set it as start. You can do this by building the executable for the VI real time, right click on the VI and choose "set as startup" and deployment. But, you can now configure start screws as well although I think that it is much faster to create an executable file and the right way to do it:
Startup configuration live on target time real LabVIEW
Start screws vs executable startup on a real-time operating system
Tags: NI Hardware
Similar Questions
-
Deploying the cRIO controller host VI
When I include a Variable Shared Network-Published in my host VI, VI wants to deploy on my cRIO. Without the shared Variable Network-Published, it runs on the host as planned.
Yes, the Sub host VI post work and VI RT is under the lens of the LabVIEW project.
How to use a shared variable in a VI to run on the host computer? I need to pass data between my RT VI running on the cRIO and a host VI running on a Windows host.
Hello Shall12,
I misinterpreted your posts original - this option should be changed to the target on which variables are deployed. Based on your screenshot, the library is contained on the RIO and should be changed it. The behavior you're seeing is described in more detail here:
4TIGNL8A knowledge base: disabling auto-deployment of Scan Engine of e/s Variables
http://digital.NI.com/public.nsf/allkb/D9CF23FD2534E128862575430080CA17?OpenDocument
3V0H36XL knowledge base: connection to a host PC VI in a startup on a real-time target Application
http://digital.NI.com/public.nsf/allkb/A82CEF3FDC14DCA68625712500009649
-
Hi all
is it possible to have a target of crio running a central VI that exchanges data with the host screw turns on different hosts?
Thank you very much
Harry
You must create an exe of the target code and deploy it to the target then run only the codes of the host on different computers. Make sure that you don't have any dependency of the target code in your host code. The error you posted will happen only when you are already running a code on the target, and if you try again to deploy the code in the same target of another computer.
-
Series communication between computer and cRIO
Hello
I am not new to Labview or cRIO programming, however, venture in for my first try at the serial communication. I have a controller (not original NOR) that sends data over a serial RS232 network I want to open a parallel session to the data that I collect with a cRIO. Before we get to integrate, I try to test with a series, my computer cable and hyperterminal communications and the serial port cRIO. I followed and validated exploitation and drivers with the following text:
How to do a loopback Test series
http://www.NI.com/white-paper/3450/enHowever, when I try to use the following example, I get nothing:
Transfer data between cRIO and host series
https://decibel.NI.com/content/docs/doc-3816Any ideas on where to start? I appreciate very much all the advice.
Thank you.
I have confirmed that it is a right. I'll try a null-modem cable.
Thank you!
-
UDP communication via secondary ethernet port on the cRIO-9074 problem.
Hi guys.
I connected my host pc running LV 2010 my cRIO-9074 port using a main ethernet crossover cable. I want to use the second port ethernet on the cRIO-9074 to read UDP messages, and I want to access these messages on my host. UDP messages are sent from a local network, but for testing I also use a second pc running LV 2010 to send UDP messages.
I configured the ethernet on the cRIO-9074 ports according to this tutorial: "knowledge base 4E0DGASK: Configure the Ports of double Ethernet on real-time controllers'." " My host and primary ethernet port belong to 'Subnet A' while the second port and the second computer, sending UDP messages belong to 'Subnet B' (at the end of my post I will list the masks of ip addresses and the subnet).
For simplicity, I used the VI´s of this example as a basis for UDP communication. The "UDPServerOnRemoteTarget.vi", which broadcast messages UDP, will run on the secondary computer. The "UDPClientOnRemoteTarget.vi", which reads messages UDP, will work on my host pc.
Now, in the 'UDPServerOnRemoteTarget' VI, you must specify two IP addresses (port # remained unchanged at 3363):
1: the IP address of the ethernet port that will be broadcast UDP messages.
2: the IP address of the ethernet port that will receive the messages.
In the #1 case I put the IP address to the IP address of the ethernet on the secondary pc port.
At the #2 I tried to set the intellectual property: a) IP address of the secondary ethernet port on the cRIO, b) IP address of the ethernet on my host computer port and c) IP address of the primary ethernet port on the cRIO.
None of the parameters produced results. I also tried to change the port number, which did not help.
However, if I bypass the cRIO and connect the host pc and the secondary computer directly (by using a cable crossed a regular cat5 ethernet cable), I am able to send and receive UDP messages (the two stand-alone always are on different subnets). I guess that this at least excludes any fault in the VI´s code.
Does anyone know what I'm doing wrong here? Is it possible at all to read the UDP messages that are sent to the secondary ethernet port on the cRIO my host pc?
I have searched the entire site OR and forums, but didn't come through all that solved my problem. Most of the other tutorials configuration resembling my case is to import the device sends UDP messages in the project, but which is clearly not possible in my case, or is it?
My IP settings are:
cRIO 9074:
Primary ethernet port: 169.254.62.215
Secondary ethernet port: 192.168.0.102 (static)
Host PC: 169.254.58.4
Secondary PC: 192.168.0.144 (static)
SubnetMask on all ports are the value 255.255.0.0
I hope someone out there can help me out.
Kind regards
Phat
Solved.
Stupid mistake. I was running the VI on the host instead of the cRIO pc, which explains why direct communication between the computers worked. Everything works well when it is compiled for the cRIO.
Kind regards
Phat
-
CRIO using to publish to cDAQ DAQ?
All,
I worked on the integration of cRIO DAQ (9073) (2) existing environmental testing rooms and next to improve resolution of acquisition data and controllability. My plan of material NOT included installation a cRIO-9073 in an enclosure behind each room with cable for TC/4-20mA/RTD DAQ cross led in the room of the TEU. Two of these cRIOs will host code RT publish their data on a LAN. In the control room for the rooms, there are two PC which is BOTH be querying the network for all data from these TWO cRIOs. In this way, operators can choose either PC for both rooms at any time.
Now for my problem. It was requested that buy us cDAQ-9171 (USB) or a cDAQ-9181 (Ethernet) and to install one in each room. These single module Renault each contain a 16 TC (NI 9214) card. The reason for this is to save money (we will save a bunch of TC wire and connectors when installing this single DAQ modue very close of the TEU). However, what I need to know, is whether or not these products can publish temperature data on the network without direct connection to a PC. My research leads me to believe that they can not do it alone, but the specifications of the cDAQ-9171 (USB) declare that the operating system/target can be either Windows or real-time. Does this mean that I can connect the cDAQ for the cRIO and include the RT code on the cRIO to publish the data of the cDAQ to the network at a constant rate?
Ideally, we wanted to buy the cDAQ-9181 (ethernet) and simply connect it to the LAN as a standalone device, but I don't think he is capable of running RT code to publish its own data on the network at a constant speed without connecting to a PC. is this true or am I misunderstanding ability?
I need to decide if you want to try to install a single module cDAQ to reduce the lengths of cable and connectors or am I better of just any half offensive for the cRIO.
Thank you!!!
Hi ckc8302.
Your assumption is correct - none of the single - or multi - slot USB, ethernet or wireless CompactDAQ chassis is able to execute code in a mode stand alone as you are used to with your cRIO with LabVIEW RT and/or LabVIEW FPGA. You can use a stand-alone cDAQ for this purpose (such as the cDAQ-9139) who almost certainly beats the savings target you are trying to answer in the present case.
You are also right in saying that cDAQ USB (9171, 9174, 9178) are supported with LabVIEW RT in general targets, but the downside is that they are supported only with x 86 / x 64 targets as the cDAQ-9138/9139, cRIO-9081/9082 and PXI systems. Value cRIO controllers use a different processor and architecture of the o/s to implement a LabVIEW RT support, and these objectives are unfortunately not taken in charge by NOR-DAQmx and CompactDAQ.
You might consider would be to buy a cheap computer and run a version of Windows on it or make a RT Office for use with LabVIEW RT. You can then use it to host your proposed solution of cDAQ USB, and you can run LabVIEW code on this desktop computer to publish data on the network for your existing systems of cRIO consumption. The only other option I could think of at the moment would be to continue your TC probes out to your cRIO of wiring systems, as you mentioned.
I hope this helps.
-
Causing problems of custom data type to deploy the shared target RT variable
I seem to have some difficulty in using a shared variable published network created from a customized data type when it is deployed as an executable on a target of cRIO RT. I'll start by describing why I think that this is the rub. I created my RT VI in the LabVIEW (LV 2012) development environment and everything works fine. This VI is quite simple, because these were quickly devolved into an exercise in debugging. The RT VI begins by simply flashing the LED to a couple of times and then starts a loop simple acquisition to read some values out of the material using the analytical engine (while still flashing the LED of the user). After reading the material, the values are grouped in a cluster and written in a shared variable published to the network defined by a custom control type def. The custom control contains five floats double precision. If it's important, the RT cRIO system hosts the shared variable in this case.
So I have that deploy in the development environment, and everything works fine. The LED flashes merrily along, telling me that the program runs correctly. Running a VI host who reads the shared network has published variable gives the desired result. Everything is good.
Now, I want the cRIO system to run this simple program by itself at startup. I build, set it as start VI, deploy it, and then restart the cRIO target. The LED never flashing... the VI doesn't seem to work. I'll spare you the major part of the work of debugging and access to the end. I basically "diagram Disabled" various sections of the code up to the VI began to run correctly in an executable file. I kept reducing the size of the disabled code until something has been disabled: the writing in the shared variable for the custom data type.
So, I guess my question is this: are custom data types defined by type def would be personalized orders authorized executables to RT? I read through the cRIO Developers Guide, my book of development in real time course of NOR and the white paper using shared Variables and I see nothing that forbids it. I know that there are things not allowed in the executable files that are allowed in the development environment (property nodes façade, dialogue live, operating system specific calls, etc.), but no mention of the shared variable type custom data. Any ideas as to why my VI is running in the development environment, but does not update unless I have delete the entry on the published network variable shared?
Thank you in advance for your help!
You must disconnect the data types of variables and then recompile. You can find it useful to keep on disk, a copy of the original lvlib.
Don't know if this is a bug or not. It was suggested by someone in the forum that putting the ctl files in the right position (the disk? in the draft?) would allow the rtexe start; I did a quick check and it didn't work then I dropped the tests more far.
-
How can I connect the HOST PC COM port under cRIO 9074?
I can't find any HOST PC COM port on my cRIO.
I tried to use the global variable, but it was useless. Is there a solution?
sad0000 wrote:
I can't find any HOST PC COM port on my cRIO.
And why should he? A cRIO is really another computer. You expect your PC to see serial ports to another PC on your network? No, you wouldn't.
If you really want the cRIO again the serial port of the PC communication, then you will have to apply on the PC that can communicate with the cRIO, usually over TCP/IP or network stream.
-
I have a project including a VI RT running on a cRIO-9030 and a host VI running on a desktop computer. The two programs communicate via shared variables that are hosted on the cRIO. As shows, when I run the screw of the project, everything works as expected. When I compile the RT VI in a start-up executable can deploy for the cRIO, as well as the libraries of shared variables (the record of support in the build specification-oriented), I am unable to connect to the executable running in real time.
I have 'Disable Autodeploy Variables' checked on the cRIO target, if I no longer get the prompt to stop the currently running application to deploy the variables. The host VI opens and appears to run, but has no connection with shared variables (data does not update). Compilation of the host VI as an executable file and it works outside the project result in the same behavior.
I read some relevant posts / knowledge base articles related to this problem, but still can't seem to find a way around it. I note a number of articles on the series in double bond of variables, but this is in contradiction with my possible behavior for this system: I finally have a number of cRIO controllers identical all runnning the same executable RT and want to be able to have a single host VI which allows the user to select from a list of available controllers (using the screw system configuration) and extract the host name of the controller selected, that would be later used for programmatic addressing of the variables on the host of part VI.
In any case, I want to start with the simple fact of being able to get that first controller running without an open connection to the RT VI project. With the deployed executable start, I checked via programmed behavior of LED application of the RT and FPGA are running on the cRIO. The problem, I think, has to do with shared variables, but I'm not sure where to go from here. I want to connect to RT executable running from the VI to the host (in project) to verify that the compiled executable of RT works as expected and then the subsequently compile host VI in an executable that can be run from any desktop on the local subnet.
Thoughts?
It seems that the error has now been corrected. There were three things, I changed: the file startup.aliases in the startup on the target directory (Home: / lvuser/natinst/bin) put in 'localhost' as an alias for the controller. I changed it to the IP address of the controller. Then, I got some features of IO files in my application RT relative paths using the path obtained by the 'current path VI' VI. As this path changes according to the location / delivery system, I had to create a VI that has used the Application property: type with a case properly structure band / build railroads desired regardless of the runtime system data files. This may have broke my RT request. Finally, I got a property node in one of my RT SubVIs, who attempted to change an indicator in the Subvi, which is not taken care of in an RT compiled executable. I can't do this for debugging purposes somewhere along the way, but in any case, I removed it, and after a recompilation and the deployment of the executable of RT, everything seems to work as expected today. The host VI on the desktop can connect to the application of the RT project, and when it is compiled into an executable file, which also works.
-
cRIO: best way to start/run a VI running on the RT.vi of the host.vi
Hi all
I recently (3 weeks) he started to use with Labview/cRIO. I think I have the concept of the cRIO down, but I'm fighting on what seems to be a simple communication in Labview. Here's my problem:
I have a cRIO 9074 with x 1 NI 9234 (4 analog input channels) and x 3 modules NI 9512 (motor controller). I am running in hybrid mode. My RT.vi control all movements of engine (scan mode) and also the FPGA FIFO beginning/read it. My Host.vi is in fact a UI and did some post processing on the data that I acquire by my NI 9234. My issue is with how to begin the RT.vi of the Host.vi. Just use the "VI reference.vi open? I tried but I do not think I do it properly, because what settings should I get for this? Can I configure it with the IP address of the RT? Also, for the path of the file, where are the screws on the RT?
Thank you!
Troy
Note: The final product must be converted into a .exe. If the implementing method is to open/run the RT.vi automatically.
Normally you compile the application of RT, deploy and set it as the startup application. In this way, it will be saved on the internal flash of the cRIO drive and will automatically load when you start the cRIO. What is an option for you?
-
cRIO-9114 don't reset the host.vi programming interface
Hi, I use Labview 2009 with a target FPGA 9114 cRio controlled from a host PC.
Host opens the target FPGA (open FPGA vi reference) and then executes a loop to write output voltages via the FPGA - target.vi in an analout 9264 module. Works very well.
When the loop in the host.vi is stopped, I tried that reset just as method of FPGA interface outside the loop to restore the default values defined in the FPGA - target.vi the analog output voltages. However, the values are not reset, but remain at the last value in the loop.
The only thing that works is by using the method of interface FPGA download instead of resetting one after execution of the loop.
Any ideas why the reset function and/or stop does not work?
Thank you very much!
Can you post your code? I guess that the analog value is never sent when you stop. The program closes faster than analog writing. That would be my guess based on the way you have described.
-
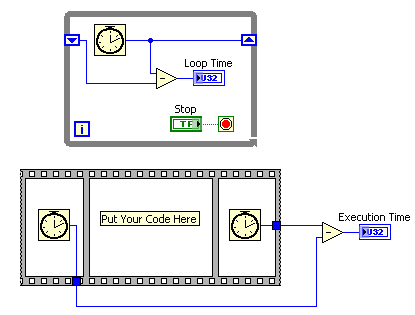
Host VI and cRIO execution time
Hello
I have a cRIO 9014, I run an application real-time with two loops and a host of VI in my PC, the host VI is slow kynda, but I would like to know if there is a way to check if the cRIO rotates at the speed it should run.
Thank you.
-Luis
Luis,
Here are the two methods for timing your code that I described in my last post. The top then loop uses a shift for you register say how long (ms) takes of each iteration of the loop. The structure of the bottom flat sequence will measure how much time (ms) a section of code takes to run.
-
Frequent disconnects between cRIO-9024 and host computer
Hi all
I had a brand new cRiO OR 9024 and several modules of recording data a few days ago. I have setup the IP address for the cRIO which is 10.0.0.2 and the subnet mask is 255.255.0.0, which is the same with what I've done for the host (different IP address). I installed the software that I need on the controller RT. Throughout the process, I have disabled the firewall. I use MAX 5.0 and NEITHER cRIO 4.0. Two of them are the latest version. I built the link between the cRIO and my computer successfully. However, the target is always disconnected from the host computer, even if I do not have action on the cRIO, that is. Without running any software on it. Status of the disconnection is achieved since the MAX, but surprisingly, I can ping through the IP address of the cRIO. It seems to me that the connection between the host computer and the cRIO was established.
I tried to run code on the target, but unfortunately, the disconnection also occurs frequently simple. I checked the CPU target and the use of memory, which are low. So I concluded that the disconnection is not generated by the high utilization of the processor or memory.
I also tried to reformat the cRIO and reinstall all software, but it has no effect.
I also found that a warning appears regularly on MAX interface that "there was a problem to retrieve the settings of the target. For more information, go to ni.com/frinfo and enter the Info Code MAXServerUnkownError. If the problem persists, contact National Instruments'. I checked MAXServerUnkownError of
NI.com and followed the instructions to make sure that there is no bad configuration on my computer as a firewall etc. However, without doing wrong was found.
Can someone help me figure out what is the problem?
Concerning
Japanese
Hello Japanese,
Thank you for answering my questions. I have more questions that should lead to a solution to your problems:
1 is the add-on NO-time installed on the cRIO?
2. are you able to disable the antivirus on your computer?
The add-on NO-time turns out to cause frequent disconnects with cRIOs in LabVIEW 2011. To view the add-on, you will need to right click on software under the cRIO, select Add/Remove Programsand select the option custom software installation . If it is installed, I recommend to remove this add-on the cRIO to help solve disconnects.
Please let me know if disconnects continue after removing NO-time and disabling the antivirus.
Kind regards
Andrew Brown
-
I want to host my shared on a cRIO Variables, but use DSC to recording/alarm/SCADA
Hello world
What I try to do is the following:
-Host variable static on my goals of RT (cRIO-9022) for reliability
-Use the DSC module to log on to the database, followed by alarms, develop a distributed HMI
The problem that I am running is that the engine of the DSC (seems) should the shared variables, it is taken to be hosted on this computer. The DSC engine cannot run on a real-time target.
My ultimate goal is to create a wide network of the plant of the cRIO which are all connected to a central PC/server that runs DSC to collect and store data in a database. The HMI plant would also connect to the central server and get their information from there (not directly related to the process of cRIO). Is it possible / have ideas on how to do this effectively?
Thanks for the help.
I have a similar architecture. I host my NSV libraries on of my cRIO and then create linked libraries 'mirrors' on the host computer that is running my HMI and logging of DSC in my database of the Citadel. The project of LV has a tool to create related libraries. I have also written a tool create me a library cloned with the original library on the cRIO liaison. The NI PSP Protocol makes this type of very effective bound library.
-
SoftMotion cRIO - how to read the position of a host from a sample of the expedition?
When you open the examples provided with NI SoftMotion, generally there are two loops. The main loop and a loop that contains the following message:
"The position of reading and tracing normally would be on the host by reading data from the target. This is done in this example for simplicity. »
Then, we advise on the Panel before you go to ni.com/info/f/ and enter the info code nismex for more information on the use of this example in a system of real movement.
My question may seem obvious, but how "read the position on the host by reading data from the target?
I tried to use the block function NOR SoftMotion read inside a VI on the host, of course, it does not, because the resource is on target.
Should I leave the second loop inside the VI running system cRIO and just no conspiracy, but subscribe to a shared variable? I see that you can do a right click on the function block and select if you want output to be a shared variable. Or this second loop is supposed to be removed from the VI running on the target RT? How reads the position then?
To see an example of what I mean, open this example: C:\Program NIUninstaller Instruments\LabVIEW 2009\examples\Motion\FunctionBlocks\Axis Straight Line Move\Axis right Line.lvproj
Thank you
Fabiola
Concerning priority and when you call the motion function blocks:
The NI SoftMotion engine for cRIO uses a background 'pilot' that runs in phase of analysis on the CompactRIO system engine. This provides the required sync and sync for motion runs correctly. This 'pilot' motion function blocks, simply send asynchronous commands. You can consider them as an API to the engine of control of movement control. You are not required to synchronize the function of movement of the scanning engine blocks or even to perform at a highest priority. However, you will probably choose to run these a higher priority or in a loop timed for reasons of prioritization of execution. For more details on the NI SoftMotion architecture and recommendations on how to build movement on CompactRIO systems discover the CompactRIO (http://www.ni.com/compactriodevguide/) Developer Guide. It has been updated in December 2009 and Chapter 5 now has much on the order of movement on CompactRIO complete with examples of projects.
Maybe you are looking for
-
Agent of photos using the battery
Hello Recently 'Photos Agent' used a lot of energy, and I can not identify why. It will appear under 'apps using significant energy' and my fan go crazy mad and my computer feels as if it were about to melt. I checked all the settings to iCloud and P
-
I have loaded the wrong language on my new imac so now how to remove it?
I deleted the program several times to recharge the English - United States, and it still does not change some of my menu items, IE. bookmarks and Add-ons, etc. I can't find the files on my imac to remove. I want a clean 3.6 old version of Firefox on
-
Before my laptop HARD drive goes wrong, my finger swipe worked very well. Since installing the new HARD drive the laptop says the the finger swipe is not installed. Is there a way to fix this?
-
Could not find the network driver: PCI\VEN_14E & DEV_165F & SUBSYS_2133103C & REV_00
I can't find a driver for a Proliant Server network: PCI\VEN_14E & DEV_165F & SUBSYS_2133103C & REV_00
-
I try to use movie maker, and he repeated to me that I need a codec to be able to open the file which actually happens to be an avi file. I tried to download the codec installation package and cannot do anything with the files. I also changed the opt