For a sequence in real-time output variable
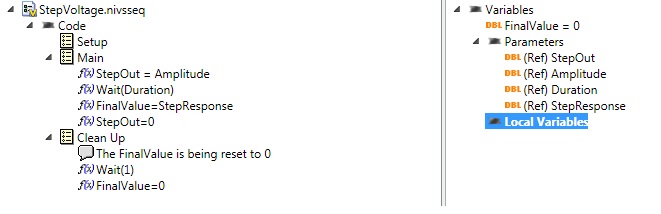
VS 2011, I have a sequence of real-time voltage step that sets an AO for a voltage given for awhile, and then resets the output to 0.
Just before setting the output to 0, I want to read the response of my this stimulus of an AI System I call StepResponse. To do this, I place this in FinalValue I set as a Variable in my script. In other words, it is a parameter or a local Variable.
Now, how can I get this out FinalValue? I don't see anything on how to "test" this variable to one of my user variable... I was able to do with the stimulus inherited in VS2010 Editor. Now, I'm stumped.
Here is the sequence:
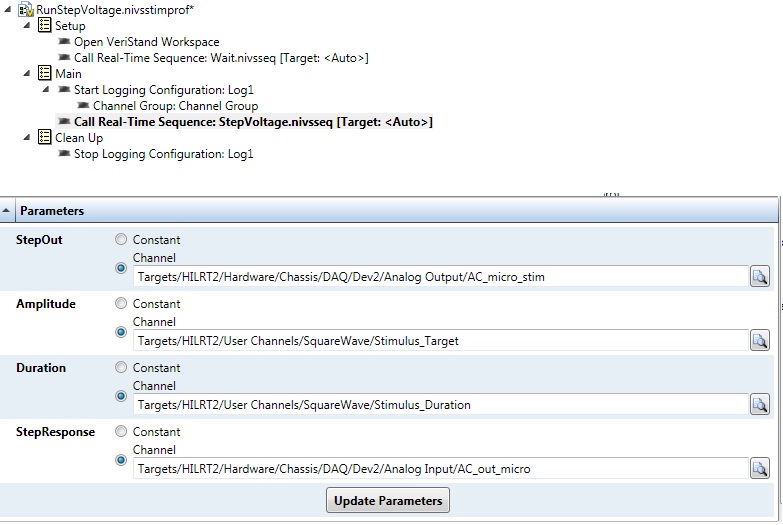
and this is the profile of stimulus and settings below. I can set the fine settings via the API of LV, or run the Publisher of the Stimulus. But I can't seem to get out this FinalValue...
THX.
L.
The return for a sequence (in your case FinalValue) variable is returned to the caller once the sequence has been completed as a result of this sequence. In your example, the appellant is stimulus profile that you configured. In a profile of stimulus, two relevant things will come based on the return value of variable a sequence called:
- The return variable value will be get recorded in the file of test result ATML for stimulus profile
- You can configure an assessment of output for the call to test sequence make a basic on the return variable test to determine a pass/fail result. For a numeric variable to return such as FinalValue, you can do a check of numerical limits to test whether the value is in or out of the specified limits. For a Boolean return value, you can translate either directly in a pass/fail result, or you can reverse the logic as well as False implies Pass.
In addition, the LabVIEW API has a function, you can call once the sequence finished to programmatically retrieve the return value.
However, in your sequence after that you store the value StepResponse in the return variable, you reset to zero before the end of the sequence. If your sequence always returns zero. I think that you do not remove this line and let FinalValue what so that you will get the StepResponse back closure instead of zero value.
Tags: NI Products
Similar Questions
-
Hello
I'm new to labview and trying to develop a system of eye tracking using labview 8.6. He has the vision development module, and I was wondering if this was not enough for the treatment and real-time image acquisition or could I need other software tools.
Yes, to acquire images from a webcam, you need drivers imaq-dx.
Take a look at this link:
http://digital.NI.com/public.nsf/allkb/0564022DAFF513D2862579490057D42E
Best regards
K
-
Error-307650 during a sequence in real-time with API LV
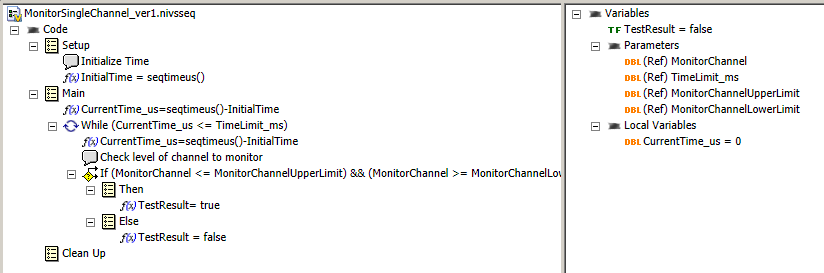
I created a basic real-time sequence that checks the time it takes a signal reach a certain threshold.
On the side of the LV, I use the API to call this sequence. I make sure that all channels and settings are defined as in the examples. However I get 307650 error that says "NEITHER VeriStand: Index was out of range." Must be non-negative and less than the size of the collection.
' Parameter name: index.
Any suggestion to help here? THX. Code is attached.
There are two problems here:
1. The Stimulus profile editor is not indicating that there is an error with this sequence, although there is a. Note that the variable InitialTime is used in an expression, but is not declared as a parameter or a local variable.
2. you get an error at runtime because of it, but it's not terribly useful (index out of range).
You can fix this by adding a local variable of InitialTime to your sequence. I dropped the CAR 338386 about this bug.
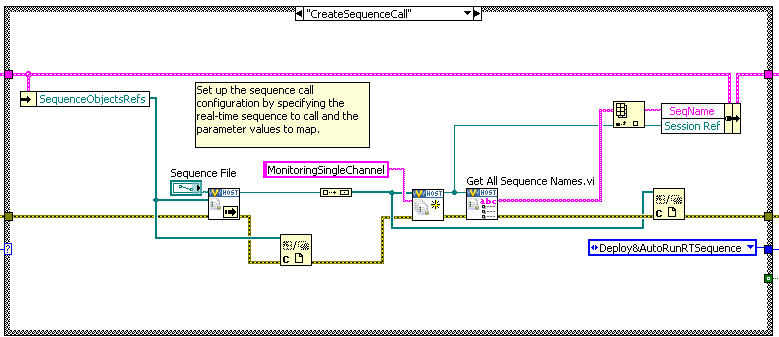
Once you do this, there is something extra, you will need to set in your VI which runs the sequence so he could get the results of the sequence properly. You use correctly the value of the sequence name to read the back of the sequence Variable. You use the Session name used during the deployment of the sequence. Which does not match the name sequence.
To get the name of the sequence, use VI to get all the names sequence on your session profile of stimulus to get the array of names for all of the top level of the session sequences, then index on the first point, given that you only use a single sequence. Example below:
-
Shared on a real-time target Variables defined causes the command to remotely fail
Here's a strange. We create a solution of customer using a CompactRIO, and they want remote panels can view and interact with the executable file. That's fine, we are able to create this, but we noticed a thing is:
If we build and deploy our code in real-time for CompactRIO with all shared Variables associated with a type definition, the executable will not run. Indeed, it is reported by the browser as a broken VI remote Panel utility.
Breaking the shared link Variable with the type-def and rebuild the executable file, solves the problem. Weird.
Anyone else seen this before?
Hello Thoric,
I think I spotted a CAR already assigned to it:
http://www.NI.com/white-paper/13235/en
#292012
Looking at our notes this should be fixed in the next version.
-
Is there a tutorial for creating executables in real-time?
I have the code in real-time which works OK in LabView (not the final version no doubt but I need to learn two or three other things as well).
Now, I would like to create an executable file that I would run on some PCs with some inside monitors and control.
I found little exercise on the development of Application (shortly): 1) create shared variables) 2 create a copy of the Vi that works and to replace the controls and monitors in it with static variable) 3 Windows creating welcome 4 VI) probably create an executable after that (step not described in the exercise).
I'm currently stuck at step 3 with the 1950679035 error.
Looks like a well known error, but I found no solution yet.
My question is: which is the right way, I'm moving to? Or there is another way to create applications with control and monitoring of the device in time real NIcRIO 9072?
Sergey.
Hi Sergey,
Glad to hear that you are making progress.
And all you need to do now is create the façade in the same way that you would create a normal .exe file.
Here is a link with tips on how to create front panels: (web-based)
http://digital.NI.com/public.nsf/allkb/7F95D43D3F50FCAC8625710E000068E1?OpenDocument
http://digital.NI.com/public.nsf/allkb/7FEE6BCFD264175C8625723E000D928E
There are other links on the bottom of these pages.
Kind regards
-
Abnormal behavior observed in real-time executable.
Hello
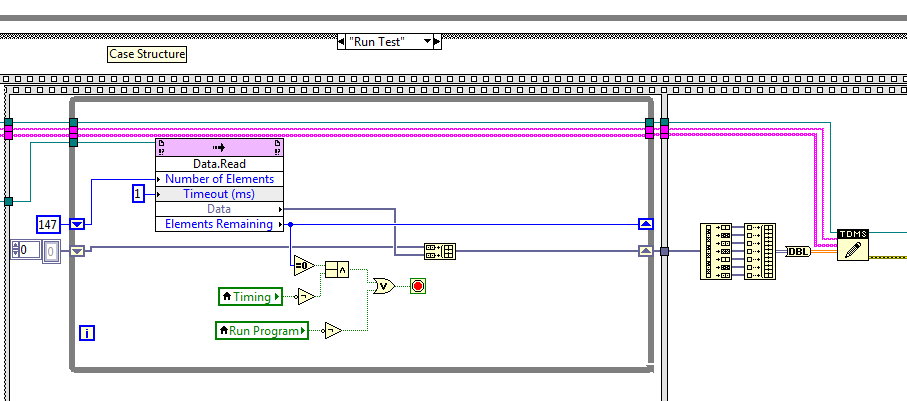
I have an interesting problem. I have developed an embedded application of Real-time/FPGA for cRIO 9024 and come across a problem that I don't understand. I work FPGA and RT of top-level and subVIs, proven individually and together when it is run interactively. When I create and deploy an executable in real-time like start, however, the behavior changes. I posted the code below, which I'll explain briefly:
I have a state machine with 5 States architecture. "Initialize" and "Shut Down" are exactly meet once whenever the device is reset, and the cycle between them is wait > pre-test > wait > run the Test and repeat as many times as desired. Measures are taken by FPGA and past in real-time by DMA FIFO and are then recorded to the TDMS file by the real time. Everything else is just interface.
The problem comes from the first time, the program enters the Test case to run. The FPGA send measurements as usual, and they are stored in a growing table updated buffering in the fixed-point shift register shown below.
Run interactively, this method successfully bed, buffers, sorts and writes all data in the file. However, in time real executable, only the data collected in the first round (147 items total, as it is initialized by the whole shift register) are saved, the rest seems remainsin a buffer? before calling the following function TDMS write, is that in the case before the next test.
I'm unable to debug the executable file in real time, probably because of the FPGA reference or some other schema components. I tried to replace the pad with a FIFO in real-time, a variable shared with RT FIFO active and tried to write inside the loop. The FIFO are not improving the situation, and when writing inside the loop, the loop does not run quite fast to stand.
The problem does not exist when I run the VI interactively from my computer, only when I try to deploy all of the embedded, any application that works (as far as I know) except this one place.
Any ideas to solve, or workarounds?
Ryan
Technical support helped me to resolve the problem, the early termination of loop caused loop condition, although I still don't understand why the behavior was different as an executable file, because the condition of the loop has worked in interactive mode, so if someone has any ideas as to the why, I would still like to know.
-
Satellite Pro M30 - real time clock shows wrong time
Hello!
most of the time I am using my Toshiba satellite pro m30 without the battery with the energy of the power system. the battery is stored somewhere outside of the computer for a month the real time clock shows a bad time if the computer is started after a period of time.
I think my cmos battery is going to die soon.
someone has an idea, how this cmos battery can be changed by myself?
Thank you
ReinhardHello Reinhard
I agree with you. It is time to replace the CMOS battery. It is not easy and the machine must be dismantled. If you are not familiar with the procedure for disassembly, it can be dangerous. A small mistake can result with damaging material.
If you want to do it alone, you do so at your own risk. Be sure to use the right battery. Maybe you won't believe, but if you use a battery hurt it could cause battery explosion, or other damage.
I'm not 100% sure, but the RTC battery must be placed on the left side near the touch pad. If you want to only please be very gently. The laptop parts are very sensitive.
-
10GBE Optical Desktop in real-time?
Hello
I was looking for possibly using card NIC a10gbe (dual-port of preference) for a project I'm working on that involves a standalone that will emit a lot of data to a desktop RT LabView FPGA. I tried to look through some of the models which would require a RT Office, but have not seen who could go 10gbe, gigabit only. Doesn't I may look on a model, or are there materials that could make 10gbe on a RT controller, etc.?
Thanks for any help and if you know a card compatible 10gbe that would work with an office of RT, please let me know

-weiz
Hi weiz,.
Here is an article from Developer area that lists the requirements for a PC in real-time: requirements for LabVIEW Real-time targets desktop PC.
Under the support of the Ethernet Chipsets section it lists all chipsets ethernet you can use with different versions of LabVIEW RT. I checked those listed for LabVIEW 2009 and it seems that they are all Ethernet Gigabit controllers. Unfortunately, LabVIEW RT support all models with 10gbe.
Take care!
-
Dialog box to open the file on the target in real time
It is possible to load data from a file on a local PC to a VI runs on an RT target? I have a RIO OR the VI running on. From the front panel, I want to be able to click a button and have a dialog pop up where I can choose a local file to load data from. The problem is that when I try to use the spreadsheet VI load data it returns an error indicating that the dialogue has been canceled. If I use the express VI from file dialog, the VI will always return true to cancel. The dialog box never appears. It is not possible to open a local file to a VI runs on a real-time target?
Jon VT-
This function will not work in time real (RT). Please see the bulletin 2S9D21OH knowledge base: creation of a dialog box file for use with LabVIEW Real-time for more information on this. However, it only locates the files on the target of RT. If you try to communicate with a file on your host computer, you can be forced to transfer this document to the target of RT, or implement a different architecture for this task. I would also add that given the user to define the source of the file manually create non-determinisme within your system. Again, it is perhaps another reason to implement a different architecture.
-
Real - Time apply a few times using archived log file
Hi all
I have a doubt about the real time apply in Oracle 10g 10.2.0.4 version where the arch process has been configured on the primary and standby has been configured for maximum performance with real time mode applies.
But in the alert log file shall I use to find the message below rarely
So my question is why the archived files are applied pending have been configured for real-time if applies where it should apply only from logs in mode standby online.Media Recovery Log /oraclearch/oraarch/ctdr/5548.dbf Media Recovery Log /oraclearch/oraarch/ctdr/5549.dbf
Also I can't find any information on the eve of the database in the view v$ standby_log that these pending online log files have been archived in the column archived, then how to find how much data was written by process Srl rfs...
-YasserHello
The server process (RFS) remote file writes data to redo in files newspapers awaiting restoration by increase the standby database, application services log can recover again waiting for redo log files, as they are filled.
Please visit http://download.oracle.com/docs/cd/B19306_01/server.102/b14239/log_apply.htm
Thank you
Baskar.l -
Video output for PXI embedded real-time?
I plan to buy a controller PXI real-time Embedded for security monitoring.
Is it possible to use the video output of a controller PXI running RTOS to display a LabVIEW RT application messages? According to the literature, it seems that the use of the video output is more possible for Controllers PXI running Windows XP.
Is there a specific application with LabVIEW RT?
Thanx.
H.L.
Well, it works using the IMAQ RT video Out VI: images are displayed properly via the video output of the RTOS PXI controller running.
Thanx.
-
More than 1 out for a sequence variable?
A real-time sequence can cause more than 1 output variable, I could recover from the LV API. For now, it seems that the vi API return a reference to the output variable, so it looks like one...
No cluster or something like that, huh? Perhaps a table might be used, assumning we keep track of each element (is that)?
L.
Unfortunately only a single return variable can be returned for each sequence, and it cannot currently be an array type.
You can pass additional data through parameters mapped to the user channels in your system definition.
Another idea that comes to mind, but seems a little strange, it's that you can programmatically deploy several sequences in time real in a group (the API calls a Session profile of Stimulus). These sequences all work at the same time and start on time, assuming that they are on the same target of RT. You he could create so that you deploy additional sequences to use additional variables of return available. But you have to manage the synchronization when they stop and rest, or when they calculate their respective variable back.
-
Hello
I have a compact rio, which has a 4 way frame this chassis is the three modules of ni9234, they are related using FPGAs for application in real time, then using shared variables in the low-speed loop associated with a slave modbus to communicate with the domain controllers, the nor 9234 accelerometers linked to them with option ac coupled iepe on c modules , my problem is the real-time application seems to work well even when power loss occurs it restarts without problem and the fpga written hard disk portable bin files very well, but without an accelerometer connected I get readings of low noise as soon as I connect an accelerometer to one of the outputs 10 it just goes to a fixed number (0.03125) as soon as you unplug it again He returned to readout noise, I ran a scan on the modules and get only a spike when I connect or disconnect the accelerometer, I tested voltage at the pins on the module and I get 22 volts CC which makes it more likely that the material is not the problem, but software is perhaps the cause to hang up, I join the project and files for your perusal. I also realized a new project which, in mode directly linked scan has the module entry in the shared variable and the scenerio even once again. Help would be appretiated.
Thank you very much
Jason
Whren using waveform with the 9234 acquisition, we recommend the following FPGA and RT model.
http://sine.NI.com/NIPs/CDs/view/p/lang/en/NID/209114
It can be extended as a datalogger with:
http://zone.NI.com/DevZone/CDA/EPD/p/ID/6388
or using shared variables combined with the analytical engine
http://zone.NI.com/DevZone/CDA/tut/p/ID/9851
The FPGA in all this, as well as the framework of RT have used successfully by 1000s of users. I recommend giving these a try.
-
Deployment of local variables shared on a real-time target
Hello everyone, once again
I read more posts and knowledge base articles about this topic than I can count at this point, and I'm scared, I'm still not clear on exactly how it works, and I hope that someone can delete it for me, if it is to earn themselves some laurels more.

I have a project with a real-time quote and the other Windows. They shared communication via network-published variables. The real-time part also uses shared single process variables to communicate between the loops. I have the intention of all 3 libraries of shared variables (Windows-> RT, RT-> Windows and RT Local) to be hosted on RT target for reliability. Real-time executable must start at startup and run even if side Windows is not started (on the side of Windows is optional).
I realized that real-time executable will not start the variable engine shared and/or deploy itself shared variables. I also read that I can't deploy the shared variables programmatically from the side of RT. This leaves only two options that I know of:
(1) their deployment programmatically in Windows-side program.
(2) deploying the shared variables on the target RT manually via the project in the LabVIEW development environment, and
About option 1, as I said running Windows is supposed to be optional, so you have to run a program on the Windows side before the side RT will work is highly undesirable. Moreover, even if I do a little "Deploy shared variable" application that runs at Windows startup, I can't guarantee that it will work before start of the side RT executable will run. In this case, the executable file RT will fail due to not having the variable engine shared running? If so, and side Windows, and then starts the engine / deploys the shared variables, the side RT begins to work automatically? If not, is it possible to trigger this restart of the Windows startup application side?
Also, I just read everything and tried the option to build to deploy variables shared in the application of the side Windows. Not only that my RT shared Local Library variables not listed as an option (given that the application of the side Windows does refer to it in all for obvious reasons), but when it deployed two other libraries at startup, the program side of RT (which was running in the development environment) stopped. I'm not positive that would happen even if he was running like a real executable file, but it is certainly enough to make me nervous. I assumed that the library is not listed may be resolved by including a variable network-a published in the local library of RT and including the app side Windows.
About option 2, I don't understand how I'm supposed to deploy my libraries shared variables without stopping the execution of the startup on the target real-time application. Once I did, the only way to restart the application of the RT is to restart the computer RT, correct? In this case, I just undid all the interest to deploy the shared variable libraries? Unless libraries remain deployed and variable motor shared running even after restarting the computer of RT, which would solve the problem I guess. Certainly, I would like to know if this is the case.
However, option 2 is complicated by the fact that when I manually right-click on any of my shared variables libraries and select "Deploy" or 'Deploy all', libraries still do not appear in the Manager of the distributed systems, even after clicking Refresh several times, on the local system or the target system. The only thing that shows up, on both sides, is the Group of 'System', with FieldPoint, etc. in it. The same is true when I run my application in real-time in the development environment, even if the shared variables are clearly working, as I mentioned earlier.
So, if you have done so far through this mammoth post, thanks! I have three main questions:
(1) are that all my descriptions above correct in what concerns the variables how work sharing?
(2) what is the best way to meet the requirements I have described above for my project?
(3) why shared variables libraries not appearing in my manager of distributed systems?
Thanks for any help you can give on any of these three questions!
-Joe
1. Yes, as soon as you deploy the project the NSV is tranactional. EVS is loaded by MAX when you configure the RT target and begin to operate as part of the boot sequence.
2. you can see anything on your target rt in the DSM?
3. Yes, NSV and EVS are persistent resets.
-
How to pass a variable to a sub - VI a vi in real-time?
The main calls a Subvi where there is a loop for. is possible to pass a variable from inside the loop for handmade in real-time, this is while the for loop is still running?
I tried with a global variable. The global itself is updated, but if I put for the most part the global variable with a wire to an indicator, the indicatore is not updated until what the sub that VI has not completely passed control to hand.
Is it possible to do?
If you are running in windows, see example vi
Maybe you are looking for
-
If I change my sim card, I lose my downloaded podcasts?
I travel for two months and will change to a local sim card. Did I lose my download podcasts?
-
i run window 8.1 64 bit recently, I installed window 7 32 bit but not detected usb modem or pen help drive me
-
Someone managed to connect with an IEEE-488 Fluke 1120une translator using NI GPIB and NI GPIB-USB cards. I use this Fluke 1120une to retrieve data from a Truerms Fluke 8921 A Voltmeter. Using NOR-MAX, I was not able to scan for instruments or get t
-
Why I always get this message: Windows Live Hotmail was not able to complete this application. Microsoft may contact you about this problem. I get this everytime I want to write an e-mail. What is the problem and why I am getting the same message.
-
HP Officejet Pro 8000 Wireless, Mac OS 10.7.2 can't get it configured to run wireless
I have an iMac OS Airport Extreme and an HP Officejet Pro 8000 Wireless Router 10.7.2. Recently, I replaced my router with an Airport Extreme. My printer installation CD is for OS 10.4 or 10.5. I'm trying to configure the 8000 wireless but without