infrared 6008 or stepper motor control
HY! I want to try to control an engine with NI6008 and an infrared receiver TSOP3848. I want to start the engine with the "play button" on TV remote and stop the engine with the button 'stop' at a distance. The problem is that my infrared receiver 38 kHz frequency and the NI6008 can't receiver 10Ks/s... If anyone has an idea how to get the infrared signal with Ni6008 and how to start and stop the movement of the motor please help me!
Find out!
http://CNX.org/content/m13775/latest/
Tags: NI Software
Similar Questions
-
Help me build a stepper motor control in LV?
I need control a single linear axis slide that is driven by a motor nema 34. It will be very simple move, start, move at a constant speed, stop, return. I do not have the engine. I can use a controller and a software company that sells me the slide, but prefer to use Labview.
I currently have a PXI chassis with a 6713 or 6704 available, or a '2 M Gate FPGA and cRIO-9073' with a NI 9401 I'll take delivery of every day now. I don't know much about the system in real time, but I have to learn it soon in any case.
Can I use my existing hardware/software to create a stepper motor control, or at least can I use Labview to interface with a motor drive step by step if this is not possible. I am currently looking at a 34T 1 Vexta engine, but do not know much about the stepper motors and do not really want.
Edit: Should have mention that I LV 8.6, with no motion software.
Engines step by step to have two power circuits creating magnetic fields perpendicular to each other inside the engine (in mathematics a certain sense anyway) you can consider working like pistons on a crankshaft which are out of step 90 degrees. You can use LV to manipulate these two. Want to make their vector sum in different directions while moving. Imagine making a point on a chart around the origin orbit. You need to consider things like the speed at which you can start the dot in orbit. Engines step by step can't go very fast if you add the requirement that the application start and stop without having to build your own ramp.
But it would be a big enough work for all, but more simple movements. You will need to learn less about stepper motors if you buy a motor controller that supports ASCII strings on a line of serial port as its instructions. I did recently with good results. LV must compose strings and write to the serial port of the PC. Having the engine go to a post 2205 units requires composing a string like this:
d 2205
go
It works fine without another component or software purchases.
I did something a little more complicated and wish now I had started with a decision to use the material in motion control of OR, or at least look at more the issue. When things are more complicated, using a serial port as the bridge between the PC and whatever the microcontroller is located in the drive motor starts to introduce limits you can schedule around with a lot more trouble.
You have many options depending on your purpose what is and how much trouble, you have to take.
-
Stepper motor control while reading encoder
Hello
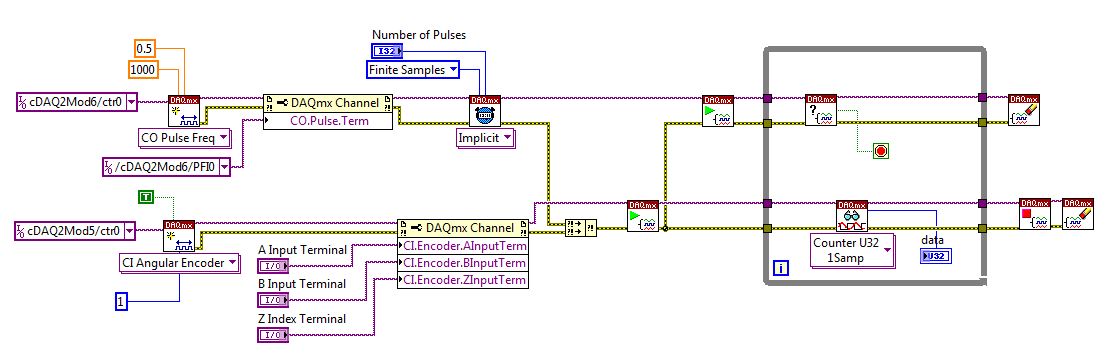
I'm looking to generater a pulse train to control a parallel reading and step by step motor in the impulses of the encoder of the motor. I was able to create two distinct VI who perform these taks individually, but when I put them into a single program (as shown below) is where I run on resource issues. I think I'll have problems affecting timers my properly and that's why I'm having these problems. I use a NI 9401 to generate impulses for the controller and a 9402 train OR read in the impulses of the encoder. If possible I would bring up just using the NI 9401 for the inputs and outputs if possible. The two are connected on a backplane cDAQ 9172 NU. Any help or suggestions would be greatly appreciated on what I'm doing wrong.
Thanks for the suggestion of Carmen, but I was able to understand what it was with a little help from NEITHER. The finite number of pulses of timing function requires 2 counters, so when I tried to read in the encoder data there where no meter more left on the backplane. Changing impulses continuously solved my problem. I'll take a background of most recent basket with 4 meters from the lab which should allow me to run the finite number of pulses and read data from encoder at the same time.
Thanks again,
Doug
-
Stepper - motor count measures
Hello
I am a beginner in the LabVIEW.I need an advice. How to count the number of steps of the motor stepper motor control turn the potentiometer and its rotation is necessary to complete the 170 steps. The LabVIEW I did the manual control of a stepper motor. I used two case structures. First of all for the start and stop of rotation and the second to change the direction of rotation.
When the motor turns to the left, the "number of steps" is incremented, and when it turns clockwise, the number in the decrements of the indicator to zero, but I need to decrement the numbers, which are recorded during a turn to the left (for example) 56 instead of 0, -1, -2, 57, 58, 59...)
Can it be somehow put implement into my program or is there another solution for counting steps?
Thank you
Instead of 2 nodes (one in each case) feedback, you need 1. But to make life even simpler, use the shift register that you already have. Most of the logic inside case structures is not necessary. Just incrementing or decrementing based on orientation. Put this value in the registry to offset. That will keep track of your number of the step. Now for the boolean array to use index, just use the function Quotient & rest on your number from step 4. The output remains will tell you exactly which line of your array of Boolean to use.

-
Problems when you try to move the 3 stepper motors
Hello
I have problems when I Isaiah to compile a 3 stepper motors control program.
I have 3 steepest motors and controller (3 SMCP33 + SMCP33-EVA) nanotec.com, they also provide an example of Vi to control a motor that works successfully, but problems happen when I try to adapt the program to try to start the 3 Motors. The final application for this is going to be a Cartesian robot XYZ so finally I need to program coordinates to move the 3 Motors.
I am new to LabVIEW, so what I do is try to adapt the nanotec example to order 3 engine as follows.
-J' I assign each engine a different address, doing so that I can run each engine separately. But when I try to run 3 programs at the same time, they work but all moving them the engine (the first that has been run).
-If I try to make a sort of sub - VI is the same thing, only one motor is driven.
-Moreover, I get a warning when I try this, I have attached a screenshot of this.
I have attached the Vi and texture it to improve my description.
I woul be grateful if someona can help aport.
Kind regards.
Thanks for posting the original. By comparing the two screws immediately gives an indication of what might happen.
In the picture you posted you circled two places where you changed the address of the reader. In the Example.vi - Nanotec address of the player is connected to about 14 seats. So when you try to run the other engines in your modified program, the 12 places, you have not changed the address of the player are always preset to motor 1.
What you need to do is to divide the example VI in at least three parts. The first part initialization. The next part moves the engine. The last part ensures that the engine is stopped and made any required another stop. Each party becomse a separate Subvi. Each Subvi has the address of the reader as input. The initialization and shutdown parts are placed before and after a while loop. The movement parts are inside the loop. You can use three of each sub - VI for the three engines or a Subvi combined with subVIs move three to manage all three engines.
I can't say what approach might be better without knowing more about how you plan to order the engines - one at a time or all three at the same time, what kind of feedback is used, how management mistakes and other topics.
Lynn
-
Where can I find the tutorial or sample Vi to control the position and speed of the stepper motor?
Hi all
I use a driver on 3rd for a stepper motor and I use USB6356 as the controller to drive the motor. Could you recommend some VI sample or tutorial on the position and the speed control of stepper motor?
Thank you
The best
I think that what you are looking for is the LabVIEW SoftMotion Module:
http://sine.NI.com/NIPs/CDs/view/p/lang/en/NID/14234
Here is a good resource on stepper motor theory:
http://www.haydonkerk.com/resources/StepperMotorTheory/tabid/192/default.aspx
My recommendation would be to start from a counterexample of LabVIEW. These can be found in LabVIEW > help > examples > material input and output > DAQmx > input meter, output meter.
-
Stepper motor and LabVIEW - loop
Hi guys,.
I'm trying to control a motor step by step using a 6008 OR. I did a little research and I know that there are some problems using the 6008 with a stepper motor, but for my project, it should work perfectly.
What I need:
A VI that will control a stepper motor and rotate the engine until the angle typed. The engine has a 7.5-degree increase. I build a VI that will continue to run the engine at the desired angle whenever I press the button 'GO '. But it only works for the first time that I press 'GO '.
The problem:
After the first iteration, if I press "GO" once again, it does not apply tension on the next pin, because it restarts the loop. And that makes the engine to become crazy.
The solution: (I don't know how to implement)
Make the engine go back to the initial position when I press the button "RESET". In the case, whenever I want to change the angle, I just push 'Reset' and then 'GO' and the engine would go to the desired position. Or even better: when I press the 'GO' button, the engine would automatically return to its initial position and then move to the desired position.
BTW: I would like to return to the initial position without having to do a 360 loop. I know how to do this.
The VI that I created is attached to this message.
Help, please.
Thank you.
Hi, Gear,
I tried to drive the stepper motor by a table of pre-defined and rotation of each step.
Hope that helps.
-
Hey everybody,
I have a stepper motor wich work good with "control engine daq-stepper (constant speed).
My problem is the constant speed.
I need to change the speed during the motion, and I don't know how to do this.
Thanks for the help and sorry for my bad English!
Hello
With the example of a constant speed at all times generate you a PWM with a cycle of constant use.
To change the speed you'll have to play with the duty cycle.
To do this, you can take a llok at the following example:
How can I change the use on my continuous pulse Train?
Kind regards
-
B6560 & 28BYJ-48 stepper motors controller!
Hi all, a Hello,.
Finally, I got my B6560 stepper motor driver controller.
I am now looking at little cost of motor control to do my first tests.
I got this reference: 28BYJ-48, but I don't get any information on the current, he pushes and he needs.
http://www.poli.br/~Marcilio/Arduino/motor%20de%20Passo.PDF
is there anyone who has already used the B6560 with labview?
and how about the 28BYJ-48 engine any help? experience to share?
Thanks advance.
amayas
The plug-volatge is 5V, phase resistance is 50 ohms. 5V/50ohms = 0.1Amp.
-AK2DM
-
cRio Steper Motor Control NI9512 step by step
Hello
I have a project at the University, and I have to design a LabView VI to control a steper motor. Apparently, everything is installed correctly: cRio-9074 and NI 9512. The engine must be running to start. Problem is, I'm just new to Labview and I have no idea how to program such a VI. I just finished all the basic tutorials on the Labview works, but I need help on how to press control the engine through a VI.
Pls help me!
Thorsten Hey,.
There is already an open post regardin your subject. Continue the Discussion here:
Concerning
Romain Imhoff
National Instruments
-
Best way to make this step motor control system
The goal of my project is to have real-time data collected by a controller of Sir 158u Dataq a stepper motor. I grappler planned on executing it with the basic stamp, but I realize that's not possible. I have a stepper motor and a L293DNE driver. I'll be permanently registration of data with the dataq, the form of volts and want these values to determine how the engine works. For example, if the voltage is 0-3 volts, I want it running clockwise, 3-5 volts not turns not, and 5-8 Volt turn clockwise.
I tried to understand this last week, searching through discussions with basic stamp, matlab and labview now.
Is there an easy way to do this? or easier way that I'm trying to understand?
Any help would be greatly appreciated!
Thanks in advance.
-Nick
Nick,
What I was describing, this is how you configure the motor controller to accept PWM of LabVIEW and mode locked anti-phase so you can control the direction of the motor. Much on the part of LabVIEW depends on the acquisition of data you use. For example the acquisition of your data doesn't have a counter which can generate a PWM? I did some checking everything on time and the acquisition of your data is not made by National Instruments and I couldn't locate the native LabVIEW drivers. I did however go to the MFG Dataq 158u site and found that they do not have drivers LabVIEW BUT their software (SW) should run in the background. Dataq 158u website also has a help forum, I suggest you start to understand the capacity of the 158u Dataq. Also it seems that you are not familiar with LabVIEW, until you can take on a project like this, you have to start with the LabVIEW Basics, learn how to manage the tables so you can store your results of EDA and records the use of loops and timing and movement. NOR has a basic training FREE as the intrudction 6hr to LabVIEW, I would like to start their. Oh, and in your OP (original post) you doubted the Basic Stamp could do that, I do this type of control using the Atmel microcontrollers all the time, I'm sure that the stamp eaisily could do. Download right on one of their forums for more information. Oh and to answer your question a UPS is an IC that reverses the input signal, which you would end upward with the direction of you pines motor controller is PWM on a spindle and 180Deg off phase PWM, on the other hand.
Alan
-
Hello
I have a cRIO-9014 with a NI9505 DC brushed servo drive module and I would like to program the FPGA to PWM and encoder, quadrature, interfacing using the functions of intellectual property intellectual property mentioned in "CompactRIO Motor Control Basics Tutorial":
DX of encoder quadrature method (FPGA, using SCTL) .vi
Pulse Width Modulation (FPGA, using SCTL) .vi
I did a search at ni.com/ipnet but I could not find them.
Where can I find free downloadable IP cores for the blocks of PWM and encoder to include them in my interface FPGA program?
Thanking you in advance,
Manual
Found by myself (google search!) to:
https://lumen.NI.com/nicif/us/codepowelecguide/content.XHTML
-
Bipolar stepper motors (x 2) to follow a set of coordinates
Hello!
I want my bipolar Motors (2 x) to follow a set of coordinates, so I hope that someone could help me get started.
Motor control step by step vi receives an amount of markets, negative amount to take a step back.
As well; to calculate the amount of the steps needed to get to the next coordinate: number of steps = active coordinated - previous details
In the game/list/table I want to indicate if it is for motor 1 or 2 and if a specific, additional signal is on or not.
Example of
10231 engine 1 without additional signal on, moves to coordinate 231
11300 engine 1 accompanied by a signal on, moves to contact information 300
00231 2 engine, without additional signal on, moves to coordinate 231
01300 engine 2, accompanied of a signal on, moves to coordinate 300
When the first digit indicates the engine 1 or 2, the second digit if the additional signal is on or off and the 3 last is the desired coordinate.
The first 2 numbers must be split individual signals.
The amount of contact information will vary.
Regrads,
Thorstif
Place a cluster in a table, it unbundled by name.
-
need suggestions on the way to a position on a motor control with current continuous
Hi, I'm a newbie with labview
I'm doing a position on current motor control continuous. I use a USB 6259 to generate an output voltage and acquire the angular position of a coder.
I enclose my system of proaction
How can I transform into a feedback system, with a given reference signal?
Thank you
The "cascade dc motor speed regulator" example uses the Control Design and Simulation Module, and it is thought to control a motor which is simulated. Since you have to acquire data from a real system the standard while loop is correct.
With respect to the operation of PID control, you can take a look at the following examples:
-
OR sell stepper motors or continuous or not?
Sorry if this is a silly question but I have conflicting information on this topic... Clearly, I see engine illustrated with prices but a rep OR was told that they don't sell the engines so they'd put me in contact with the 3rd party sellers? What sells not just dimmers NC status, but both engines? Thank you...
Hey, paris,.
Not ridiculous at all in question. We dinfinitely sell stepper motors. Initially, we didn't, but we saw that the demand was there for a "single window".
You can find a variety of them here
I hope this helps you.
Maybe you are looking for
-
Aspire E11 guard lock, ran the scan with Trend Micro House Call and no malware found.
Bought new 8/10. Installed Windows 10 a few weeks ago and it ran great until the last couple days. Blockages occurring more frequently, cursor freezes. Scans with Malware Bytes and Trend Micro House Call found no malicious software. Any suggestio
-
Debugging/fixing a mistake svhost.exe?
Greetings, After having inserted a USB on a PC hard drive, I started to get error svchost.exe at the end of the boot sequence. I scanned the log file, but the messages are not clear for me. Can someone give me some advice on how to debug or fix this
-
When I update my wireless drivers, they last not but a day or two. Can you help me. Thanks bg patterson
-
Hello Is anyway for the passport of Blackberry to change directly online Google Docs or Google spreadsheets? The Blackberry browser only allows me to view, but not change. The Docs to Go app does not seem to offer this ability to do online editing.
-
Error creating registry key, RegCreateKeyEx failed; Code 5 access denied
Just as the title says. I encounter and error where a program is unable to create a registry key. Error 5, access denied. I tried as admin and the problem still persists. I tried to run the registry editor and access, but still the problem persists.