Real-time Application Installer
I built two requests in real time; one for a PXI Chassi and the other for a compact field point. I wish I could send the customer updated versions of applications in real time and ask them to install them to the respective chassi/fieldpoint in the field. The customer is not the development environment. I looked around MAX, but could not find a way to do this.
Any ideas?
Thank you
Kevan-
HI Kevan. Take a look at replication system tools. According to me, it appeared in 8.0 or more.
We used the tools NOR as basis of our own tools of level end-user to exactly what you are
describe (in addition to the upgrade of the OS, if necessary).
Matt
Tags: NI Software
Similar Questions
-
Control software for real-time Applications
Hi all
We develop products based on the platform or sbRIO and deploy applications to the target in real time. We need to get these what UL listed products and part of the procedure test requires that the software be locked and not changed while the test is in progress. For this I need a way to get and display the checksum (or some other signature) of the currently deployed on the target real-time application.
Is there a way to do this? Please let me know if you need more information.
Thank you
Hi LabVIEWingToday
On the first link in the previous post, there is a section that explains what is the checksum and they recommend a community tool or a LabVIEW VI, you could use programmatically.
To calculate a checksum on the key files, consider using the File.VI MD5Checksum, which is built...
Concerning
R. Esteban
-
Hello
I have a compact rio, which has a 4 way frame this chassis is the three modules of ni9234, they are related using FPGAs for application in real time, then using shared variables in the low-speed loop associated with a slave modbus to communicate with the domain controllers, the nor 9234 accelerometers linked to them with option ac coupled iepe on c modules , my problem is the real-time application seems to work well even when power loss occurs it restarts without problem and the fpga written hard disk portable bin files very well, but without an accelerometer connected I get readings of low noise as soon as I connect an accelerometer to one of the outputs 10 it just goes to a fixed number (0.03125) as soon as you unplug it again He returned to readout noise, I ran a scan on the modules and get only a spike when I connect or disconnect the accelerometer, I tested voltage at the pins on the module and I get 22 volts CC which makes it more likely that the material is not the problem, but software is perhaps the cause to hang up, I join the project and files for your perusal. I also realized a new project which, in mode directly linked scan has the module entry in the shared variable and the scenerio even once again. Help would be appretiated.
Thank you very much
Jason
Whren using waveform with the 9234 acquisition, we recommend the following FPGA and RT model.
http://sine.NI.com/NIPs/CDs/view/p/lang/en/NID/209114
It can be extended as a datalogger with:
http://zone.NI.com/DevZone/CDA/EPD/p/ID/6388
or using shared variables combined with the analytical engine
http://zone.NI.com/DevZone/CDA/tut/p/ID/9851
The FPGA in all this, as well as the framework of RT have used successfully by 1000s of users. I recommend giving these a try.
-
On a Linux operating system, what tools need to developed a real-time application communicating with FPGA?
It is not unclear to me by reading the documentation on the website OR tools or drivers should I install on a Linux operating system in order to develop a C++ real-time application (that interact with FPGA) which will take place on a sbRIO-9651.
Is this possible at all?
Thank you
Michel
Everything works very well with an FPGA VI, compiled with LabVIEW FPGA 2015.
1. I have installed Eclipse on CentOS 7 with cross-compiler found at this link:
Compilers C & C++ GNU for Linux ARMv7 (Linux host) 2014
2. I also install a debugger crossed to debug application c / c++ remotly. Once on the page go in the section "Linaro Toolchain for Cortex-A" and download the second link linux "linaro-toolchain-binary (big-endian). The binary gdb is in there, so you must point towards him in the Eclipse debug configuration:
3. I installed the linux drivers from NOR-RIO 15:
4. I was able to program an application to c / c++ opening and running a LabVIEW FPGA Bitstream in a few steps:
Example of API Interface FPGA C OR real time Linux and Eclipse
Michel
-
build a real-time application failed
When I Isaiah to compile my application in real-time in order to deploy it in a device crio, it fails. I can run very well by opening it and clicking run. It can deploy and run all day in this way, but he needs the computer that much too. So I need to be able to build and deploy. When I do a preview of the generation, it complements very well with no error. I put the program I want to launch the start and my folder virtual subVIs always include. It is a typical procedure for deploying projects on the crio.
When it crashes, I get an error:
The build failed.
Possible reasons
An error occurred during the recording of the following file:
C:\Program NIUninstaller Instruments\LabVIEW 2009\vi.lib\rvi\ClientSDK\Core\ModuleGeneration\CommunicationInterfaceUtility\niFpgaDmaChannelImplementation.ctl
Invoke the node in AB_Source_VI.lvclass:Close_Reference.vi-> AB_Build.lvclass:Copy_Files.vi-> AB_Application.lvclass:Copy_Files.vi-> AB_RTEXE.lvclass:Copy_Files.vi-> AB_Build.lvclass:Build.vi-> AB_Application.lvclass:Build.vi-> AB_RTEXE.lvclass:Build.vi-> AB_Build.lvclass:Build_from_Wizard.vi-> AB_UI_Frmwk_Build.lvclass:Build.vi-> AB_UI_FRAMEWORK.vi-> AB_CreateNewWizard_Invoke_CORE.vi-> RTBUIP_CreateNewWizard_Invoke.vi-> RTBUIP_CreateNewWizard_Invoke.vi.ProxyCaller
Method name: Save target: InstrumentI put in a request for service (reference #7259553), but I'm just not getting help fast enough. I'm on a real deadline here and I expected just kind of request of manufacturer to work as she has always done. I have done this a million times with other applications and never had a problem like this.
Thanks in advance for your help guys.
With the great help of sales engineer Will Schoettler, we were able to solve the problem.
1. first of all we tried to create a new project from scratch file, add all the files and the fpga of the compilation. Same mistake.
2. then we made individual buildings deploy each Subvi individually to see if one of them was the cause of error. Each built without problem.
3. I tried to create a new generation of program main crio and tweek the settings. Rather than manually adding the Subvi and variable to the section "always include" the compilation option library folder, I simply added the main VI to the list of startup programs and would make LabVIEW to understand what screws to add. For some reason, this gave me a more verbose error explanation and gave the following reason as the last sentence of the explanation of the error
"Due to limitations of the operating system, LabVIEW cannot create the file because its pathname contains too many characters."
I moved the project to the c: folder /, fixed broken in the project references, and he built the VI and deployed it is fine.
The constructor creates a directory with a very long path name in your project file, so if you have your project folder deep in your directory tree, it will attempt to create files with paths for windows too big to manage.
Mad Kudos to Will Schoettler engineering app for such a powerful and complete troubleshooting task list to try things which lead me straight to the solution. I'm glad it was something so simple and not a form of file corruption or something wrong with my code.
Thanks for trying to help the guy.
-
Real-time application does not work; source code works very well
The short version is I'm programming a cRIO and apparently the RT code isn't running after you deploy, and I can't understand why. It is further complicated as I do all this remote and I don't have direct access to the unit since I am 500 miles away. I work through a couple of other guys who know some LabVIEW, but neither is working on the site so that they explicitly trip there whenever I have a bright idea.
I was there a few weeks ago. During this time, I created a code simple cRIO, since I'm new to the cRIO, allowing the user to move a control and change a chart. It worked fine, but I must stress that it did not have a FPGA component. After that, I worked on the actual code, which reads some sensors, displays the results on a user interface and stores the results. Did FPGA. I used it in the LabVIEW environment and it worked fine, but I ran out of time before I could finish a release build and deploy the RT as a compiled application. I sent them the version later, my contact deployed but had the network stream errors during execution of the user interface.
After hours to address network problems and sending over debug versions, I tried to create a log on RT level so I could see what was going on. The journal is not yet open, even if it is the first command in the code. I have pores through the forums and found http://forums.ni.com/t5/LabVIEW/cRIO-Troubleshooting-creation-and-deployment-of-startup/td-p/1956475... which took a new direction.
I had my contact use the RT debug console and when it pulls up to the front of the RT, it shows an arrow broken at delivery. He clicked and nothing happens - no work, no list of bugs. If he shoots to the top of the list of bugs manually, it is empty. Again, the RT works very well if you run it through LabVIEW and not as an application compiled in real-time. He also noticed that the open FPGA VI was grey on the block diagram. Are no other icons.
If the problem seems to be that the compiled application of RT becomes some kind of error, but do not tell me what it is, and it seems to be related to the opening of the FPGA. I recompiled the FPGA and RT. I recompile the RT himself, but not the FPGA, because this would take hours. It is download everything properly for the cRIO. The RT is set to run automatically. It is restarted the cRIO whenever he deploys the RT. They have LabVIEW on a computer, but it doesn't have the correct drivers to run the code of the environment of LV. I am to resist have them install the dirvers because downloading big files is complicated due to the restrictions of security as well as a lousy connection at a remote site. In addition, it does not solve the problem of RT executable doesn't work is not the same as the source code, which, according to the thread above, seems to be a thing.
The last thing I'm getting is that I sent her instructions for how to build a source distribution of the project that I sent and try to deploy on the cRIO. Even if it works, I'm not sure that this is an acceptable solution, because I assume running VI, rather than the EXE is slower, and they need to speed on this project.
Simply, I don't know where to go from here. I probably need to get direct access to the cRIO and I might be able to convince them to ship to me so I can understand this point, but I don't know where I got same departure other than the Voodoo debugging standard of "trying stuff randomly until something works". I am open to suggestions, if someone managed to solve this before.
Code snippet of the first part of the project is fixed, although I don't know how much what good it will do. I am really confused, and the customer is frustrated with how much budget is going to solve this problem.
-
How 9201is used for real-time applications?
Hi all
IAM currently using labview 2009
and iam using equipment OR to work with my application
I designed an Adaptive controller for adaptive noise cancellation in labview
now, I want to use follwing material to implement my task
1 OR cRIO-9012(real time embeded controller)
2 analog input for NI 9201 module (to take the audio signal)
3 NI 9263 Analog output module (to hear the audio signal output)
How to set up these materials on real time module
can someone help me start my application
Thanks in advance
all TC
-
Basic mx data acquisition and real-time application
Hello
I am generating an output through OR pxi 6733 using the basis of programming in labview 8.6 mx DAQ.
The problem is when I create a digital output channel indicating an error and say not supported for this target.
I'm not able to use the base that I have all of the same software version installed in the HOST and TARGET of mx daq.
I use in time real 8.6 and daq mx 8.9.5.
Thanks in advance.
You use DAQmx or DAQmx Base?
I guess his DAQmx because DAQmx Base does not run on the objectives of the RT.
Can you provide us with an error code?
Christian
-
cRIO - creation and deployment of real-time independent startup application troubleshooting
I use cRIO-9024 with a chassis 9112 for a control system. I use LV2011 SP1. When you run the system in development mode (by pressing the run button), everything seems to work properly. When the autonomous real-time construction and running in startup application, something stops working.
In order to know if the application is running or not, I toggle the user LED on the cRIO using this code:
When I turn off all the code in the main VI except this loop, the application deploys and runs at startup without problem (the LED flashes). I then add progressively more loops that I want to run (by disabling the code less and less), and the problem seems to be in the open FPGA VI reference block. If I disable this block, the slopes of autonomous real-time application (I guess the error 63195, handful of peripheral communication not valid, will spread along the line, but I know that the app works because the LED flashes).
I tried several configurations for this block open FPGA VI and mixed results. For example, if I set it up this way:
The application in real-time to start runs with the reference block opened VI FPGA active but work stoppages as soon as I turn on a code that makes use of this reference in the subVIs
 .
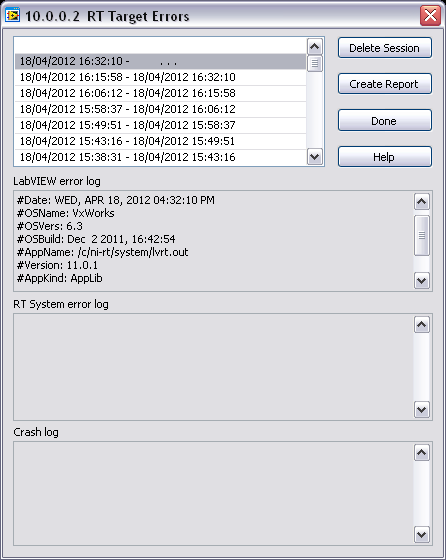
.Someone at - it an idea of what could go wrong? I have explored the messages thrown by cRIO at startup but can not see the error messages (in fact, the console output is the same when I managed to deploy an application that is running (by disabling the code). I also tried to explore the error logs (via right click on target Utilities > view error log) but cannot decrypt any useful info on their part.
Any ideas will be greatly appreciated.
Hi kkguner,
My problem is that the code runs (apparently) ok in development mode, but it seems that, when it is deployed as a stand-alone application in real time, it does not at all. As I was not able to get messages through to watch the console output when restarting my cRIO or explore the Project Explorer error logs or error, I can only imagine what is happening.
I feel that QFang suggestions go in the right direction, but I've yet to be able to determine the exact cause and the solution of the problem.
The solution I set it with has been to deploy my application as a source with a start VI distribution instead of as a stand-alone application in real time. You can try this option.
What I could try when I have some time is to clean my system from LV (whether in mass compilation or by reinstalling completely). I tried a massive compilation of vi.lib and I got a good amount of (UN) insanities, the wrong screws and several other unfortunate messages.
kkguner, let us know what you discover in your inquiry, or if none of the suggestions solves your problem.
Thank you QFang and xseadog for your help. Best regards!
--
Raúl
-
Quit the Application in real time
Is it possible to leave a real-time application of in the software (the exit() function reboots the system according to the documentation) without the system rebooting?
Thank you
Martin
The only safe way to complete a CVI RT application is to return from the function RTMain. If you are very deeply nested under RTMain when you want to complete the application, and it is not practical to place battery completely upward, then an option you have is to use setjmp/longjmp functions to jump up to RTMain.
If you do not skip a bunch of code of long jump, you must always be very careful in making sure you release/close all handles or other memory resources that your application may have acquired, before leaving. Unlike Windows, the RT process unique operating system and the process will continue to run after your application exits, so whatever you do in an invocation will persist.
Luis
-
Real-time execution trace toolkit to optimize the Labwindows/CVI code
Hello
I am trying to optimize a code in real-time in LabWindows/CVI by minimizing the time of each section of the code is taking and find bottlenecks in the code. I check this time using the real-time execution trace toolkit.
However, I just found it seems to be a constant error when you use the tool of real-time execution trace.
When I put the traceviewer 'start' and 'stop' right after the other, I get around shift schedule 9us. It seems that the CPU will in some "idle" after the start of the trace mode, or maybe it's the time of communication or something.
I'd appreciate it if someone could give me an idea of why this is happening. The time of real-time application window is very limited and I'm trying to minimize the time as much as possible. Even the United States 9 error is difficult to resell.
I used the following code:
TraceConfigure (1, 1, 0, 25000, NULL);
TraceStart ();
TraceStopAndSend (HOST_ADDRESS);and there is a photo in the toolkit of real-time execution trace.
Thank you.
Generally, you might be better off picking off the clock at the beginning and end of what you want to track. RTETT my introduce overhead that becomes difficult to quantify... Which is what you probably already see. The debug mode will also implement a ton of overhead. Then... Destemming of the clock in release mode will probably give you you the best estimate.
-
delete the host controller real time program
using NI9642 sbrio host in the sbrio real-time like a startup program now when I use the fttp: to remove the previous host program I can't remove it especially when I remove the version of the host of the project, I'm looking for a way to delete the file and work with the new real-time application program that I use it now.
Hi AlaaShaw,
Have you tried to cancel the deployment of the executable to the target and then deploy the new application?
-
How do I get the analog input signal and send it to output analog (real time)
Hello world
I do a simple task in Visual C++ and I use PCI-6221(37 pin).
Basically, I want to send the same signal of "analog input" to the "analog output".
at the same time (or almost), to make real-time application.
Can someone provide me with sample program please.
I would be grateful if you could provide me with the great tutorial that explains
step by step everything about NOR-DAQmx for C/C++ programming.
Best regards
Khassan
This is my code in C++, you can optimize it if that seems too messy. This code reads the analog input signals and exports it through the analog outputs.
To make this code additional work of the directories include and library directories must be added to OR.
I hope it helps someone.
#include
#include
#include "NIDAQmx.h".
#include#define DAQmxErrChk (functionCall) {if (DAQmxFailed (error = (functionCall))) {goto error ;}}
int main (int argc, char * argv [])
{
Int32 error = 0;
TaskHandle taskHandleRead = 0, taskHandleWrite = 0;
Read Int32 = 0;
float64 context [1000];
char errBuffRead [2048] = {'\0'};
char errBuffWrite [2048] = {'\0'};
bool32 done = 0;
Int32 wrote;DAQmxErrChk (DAQmxCreateTask("",&taskHandleRead));
DAQmxErrChk (DAQmxCreateAIVoltageChan(taskHandleRead,"Dev1/ai0","",DAQmx_Val_Cfg_Default,-10.0,10.0,DAQmx_Val_Volts,NULL));
DAQmxErrChk (DAQmxCfgSampClkTiming(taskHandleRead,"",100.0,DAQmx_Val_Rising,DAQmx_Val_ContSamps,0));
DAQmxErrChk (DAQmxCreateTask("",&taskHandleWrite));
DAQmxErrChk (DAQmxCreateAOVoltageChan(taskHandleWrite,"Dev1/ao0","",-10.0,10.0,DAQmx_Val_Volts,NULL));
DAQmxErrChk (DAQmxCfgSampClkTiming(taskHandleWrite,"ai/SampleClock",100.0,DAQmx_Val_Rising,DAQmx_Val_ContSamps,1000));DAQmxErrChk (DAQmxStartTask (taskHandleRead));
DAQmxErrChk (DAQmxStartTask (taskHandleWrite));While (! fact &! _kbhit())
{
DAQmxErrChk (DAQmxReadAnalogF64(taskHandleRead,1,10,DAQmx_Val_GroupByScanNumber,dataRead,1000,&read,));
DAQmxErrChk (DAQmxWriteAnalogF64(taskHandleWrite,read,0,10.0,DAQmx_Val_GroupByChannel,dataRead,&written,));
}
_getch();Error:
If (DAQmxFailed (error)){
DAQmxGetExtendedErrorInfo (errBuffRead, 2048);
DAQmxGetExtendedErrorInfo (errBuffWrite, 2048);
}
If (taskHandleRead! = 0){
DAQmxStopTask (taskHandleRead);
DAQmxClearTask (taskHandleRead);
}
If (taskHandleWrite! = 0){
DAQmxStopTask (taskHandleWrite);
DAQmxClearTask (taskHandleWrite);
}
If {(DAQmxFailed (error))
printf ("error DAQmx: %s\n",errBuffRead); ")
printf ("error DAQmx: %s\n",errBuffWrite); ")
}
printf ("end of the program, press the Enter key to quit\n");
GetChar ();
return 0;
} -
Robotics/control system with LabView real-time + OR DAQ
Hello
I am building this real time application in which you can try control methods for a particular system (construction of the algorithm of control in LabView on Windows) and then with a DAQ board (I have the E-Series SCB-68) communicate with the hardware (actuators).
Is this DAQ card enough or should I try with any other advice? For the application considered, it is important that the price of the freq is at least 1 kHz.
Thanks in advance
The 6220's card perfectly fine for your current application. It is true that windows is not deterministic and cannot compete with the hardware/software in real time, but your DAQ will be responsible for the management of timing and synchronization you will be fine. If the advance until you need a very quick response in real time of your application, you can always buy a RT LV system.
-
Deployment of local variables shared on a real-time target
Hello everyone, once again
I read more posts and knowledge base articles about this topic than I can count at this point, and I'm scared, I'm still not clear on exactly how it works, and I hope that someone can delete it for me, if it is to earn themselves some laurels more.

I have a project with a real-time quote and the other Windows. They shared communication via network-published variables. The real-time part also uses shared single process variables to communicate between the loops. I have the intention of all 3 libraries of shared variables (Windows-> RT, RT-> Windows and RT Local) to be hosted on RT target for reliability. Real-time executable must start at startup and run even if side Windows is not started (on the side of Windows is optional).
I realized that real-time executable will not start the variable engine shared and/or deploy itself shared variables. I also read that I can't deploy the shared variables programmatically from the side of RT. This leaves only two options that I know of:
(1) their deployment programmatically in Windows-side program.
(2) deploying the shared variables on the target RT manually via the project in the LabVIEW development environment, and
About option 1, as I said running Windows is supposed to be optional, so you have to run a program on the Windows side before the side RT will work is highly undesirable. Moreover, even if I do a little "Deploy shared variable" application that runs at Windows startup, I can't guarantee that it will work before start of the side RT executable will run. In this case, the executable file RT will fail due to not having the variable engine shared running? If so, and side Windows, and then starts the engine / deploys the shared variables, the side RT begins to work automatically? If not, is it possible to trigger this restart of the Windows startup application side?
Also, I just read everything and tried the option to build to deploy variables shared in the application of the side Windows. Not only that my RT shared Local Library variables not listed as an option (given that the application of the side Windows does refer to it in all for obvious reasons), but when it deployed two other libraries at startup, the program side of RT (which was running in the development environment) stopped. I'm not positive that would happen even if he was running like a real executable file, but it is certainly enough to make me nervous. I assumed that the library is not listed may be resolved by including a variable network-a published in the local library of RT and including the app side Windows.
About option 2, I don't understand how I'm supposed to deploy my libraries shared variables without stopping the execution of the startup on the target real-time application. Once I did, the only way to restart the application of the RT is to restart the computer RT, correct? In this case, I just undid all the interest to deploy the shared variable libraries? Unless libraries remain deployed and variable motor shared running even after restarting the computer of RT, which would solve the problem I guess. Certainly, I would like to know if this is the case.
However, option 2 is complicated by the fact that when I manually right-click on any of my shared variables libraries and select "Deploy" or 'Deploy all', libraries still do not appear in the Manager of the distributed systems, even after clicking Refresh several times, on the local system or the target system. The only thing that shows up, on both sides, is the Group of 'System', with FieldPoint, etc. in it. The same is true when I run my application in real-time in the development environment, even if the shared variables are clearly working, as I mentioned earlier.
So, if you have done so far through this mammoth post, thanks! I have three main questions:
(1) are that all my descriptions above correct in what concerns the variables how work sharing?
(2) what is the best way to meet the requirements I have described above for my project?
(3) why shared variables libraries not appearing in my manager of distributed systems?
Thanks for any help you can give on any of these three questions!
-Joe
1. Yes, as soon as you deploy the project the NSV is tranactional. EVS is loaded by MAX when you configure the RT target and begin to operate as part of the boot sequence.
2. you can see anything on your target rt in the DSM?
3. Yes, NSV and EVS are persistent resets.


Maybe you are looking for
-
print option block not available in the frames page
I tried to print this page http://www.nzherald.co.nz/ but FF does not allow me to print it as I see it. The printer produces all the columns in the order, but the Frame print options are grayed out. How can I get a reasonable reproduction of a page l
-
This model encrypted? If this is not the case, how to destroy the hard drive? Where is the hard drive?
-
Time-out error when you try to calibrate a PXI-6552 using Calibration Executive.
I make a mistake I never saw elsewhere trying to calibrate a PXI-6552 using Calibration Executive. We have been calibrating these cards for 3 years and never had a problem. The error I get has to do with the HP 3458 A DMM taking a reading. 1074126845
-
How to make an email that is returned to the sender with message delivery failed
I placed a block on a specific e-mail address. When I receive email from unwanted e-mail address, it will spam. I want the email must be returned to the sender as a failure of delivery
-
Recently, I had a collapse of Windows and had to re - install Windows 7 Pro in the course of which I lost a few programs but fortunately I have the originals on disk. When you try to reload Adobe CS6 on the PC is not recognizing my serial numbers so