Reading TCP timeout
I understand that other discussions on this topic are already, but I still have to find a solution among them.
Here's the scenario:
I have a PC (running Win7) which is connected to a monitor Signal Agilent N9020A MXA (WinXP) host over a LAN connection. The reason behind the connection to the LAN via the GPIB is software VSA 89601 B added I want to access through SCPI commands through code LabView on the host PC. According to Agilent, it's one of the ways to do so.
I have IPS assigned and specified the Agilent recommended port 5024 for a TCP/IP connection. I am able to write commands using TCP write using LabView, but I can't read anything by using TCP Read. Indeed, according to some variations of the options I tried of the subjects of the previous forum, I always end up with error 56 or 66.
I checked that the SCPI command is working to extract data using Agilent IO Interactive. It should be fairly simple. Because I want to automate this process, please help? What Miss me?
Thank you in advance.
Solved.
Remove the end must be disabled to get rid of Reading TCP timeout.
Tags: NI Hardware
Similar Questions
-
Hello
Request: I'm using LabVIEW 8.2 to connect with a RFID reader.
I connect to the player via TCP and write (write block TCP) a number of orders (connection, system of game settings, player tags list queries), and my VI works smoothly, with one exception: since I don't know how many tags in advance will be near the read drive ability, I have no method to measure the length of the data back (the block of reading TCP bytes to read).
To break down the problem, I can either read a very small number of bytes and avoid a time-out error 56, losing some data back in the process, or I can allow the system to timeout, read a large number of bytes and allowing every step of execution take time designated in the time-out period rather than the amount of time it takes indeed for the reader to respond.
My question, simplified: is there a way I can use the TCP protocol to read only the data that is sent (rather not specify the number of bytes that will be read, which allows the VI to make when no additional data is available)?
Thank you in advance.
As far as I know, there is no way to check the amount of data it is in advance. Some protocols have a predefined byte quantity, or send a message by sending the length of the message, for you first read and know how many bytes you need.
If you can not do that, what you want to do is call reading TCP primitive in a while loop until you get an error in time-out and the warp threads in a tunnel of automatic indexing output. You can then wire the string array resulting 1 d in the string concatenate primitive to convert it to a string. In this way, you can use a short timeout and read a small number of bytes for each reading without loss of information.
-
Hello
What is the default TCP on ACE time and how I can check it out. I have the sticky time set to 720 minutes. It applies to TCP timeout as well.
If you have not configured the parameter map and applied to the policy then ACE certainly will use the default values.
A way to test, it could be opening a new tcp connection and use the commmand "view details of conn" with the ip address of dest.
Conn detail | beg 10.10.10.10
and search for [timeout: xx:xx:xx].
downtime gives you the downtime for this connection.
HTH
Syed Iftekhar Ahmed
-
Common bug Variable programming read/Open Timeout
I hope someone else has a preview of the question that I see when you use a network I/O published variable or static variable in general.
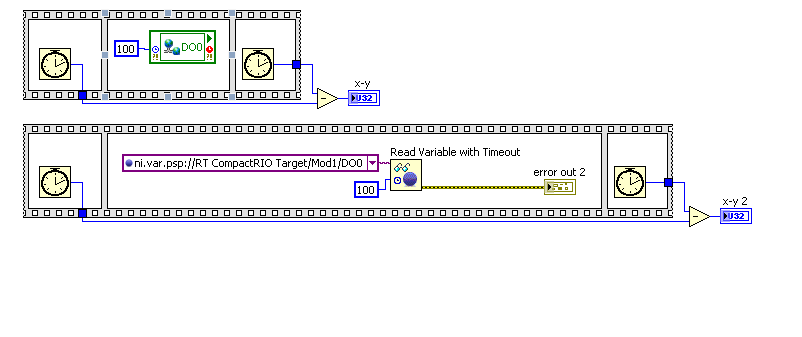
There seems to be a bug when accessing variables shared by programming. In the image below, I'm trying to access a shared variable hosted on a crio remotely. In both cases I access the same shared variable on a crio which has been disconnected from the network.
In the top box, the variable will be constantly timeout to 100 ms, when you use a shared variable node. However, under the bottom, the time-out period is still 5000 ms even if I put it at 100. There seems to be a 5000ms internal timeout in the service of programming for shared access even when you use the functions 'Reading Variable with Timeout' and ' Open Variable and check. The Vi "Open Variable shared in the background" does not solve the problem either. Time-out settings seem to have no effect if the network is disconnected when first login. It is a huge problem if I opened a GUI and the network connection is disconnected. All my demons using these variable slow to a crawl, because I can't specify a timeout.
Not only that, but the vi is not reentrant and block. So if I'm variable opening in several places, for example when using networks of actors, they all block series and create a bottleneck of the HUGE network.
I hope that someone has experienced this same problem and has a way to go around. At the moment I plan everything to use the TCP/IP protocol instead of rewriting shared or I/O variables. Or establishing another layer that my calls them to the individual cards shared variables nodes.
It's always a pain shared variable nodes are MUCH less flexible than with programmatic access. In addition, I am also using an Ethernet add-on and I have to use shared variables to read data from the modules that there is no real time running on top. Thank you
Jiles,
Thanks for the tip. I had used the SHOUT library in the past, but he had forgotten. This ended up being the solution to my problem. I still think programmatic options for shared variables need to be a little more flexible, but I worked around it.
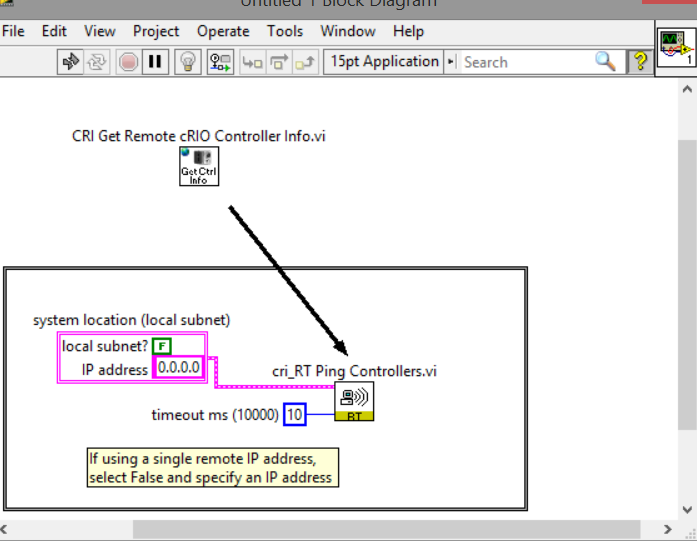
In the library the CRY, there is a CRY Get Remote cRIO controller of information within this VI is an another VI cri_RT controller of Ping. It is the function key that I ended up using. I just a super short deadline on the function and check for an error before opening a shared variable connection.
-
Hello!
Now check the status of TCP socket in wait times.
TCP is a connection Windows server and controller for cRIO with LabVIEW applications.
I don't know everything made on the State of demand in my cRIO I decide for information on physical connection timeout of entry level and application level - reading Timeout (if I can't send something - ethernet is not bound or socket is dead; if I did packets sent and get timeout response read only (: my application the cRIO died).
But when I disconnect ethernet - I do not write timeout error regardless of the value of timeout, I don't get any errors on the writing at all. I'm reading wait times only (because my system gets all the packages to answer) and then, after some time, error 66 on writing (I think - when my disconnection on its side and is TCP cRIO now the listening TCP by his own time-outs device).
Why it's happening?
Are there other tools to get the status of the socket (at least to his physical level only)?
WBR,
Igor
Hello Igor.
Unfortunately, the timeout for TCP to write command does not work as most people expect. This discussion forum:
Crosses, why this is and what the timeout command is actually configuration as well as different ways to circumvent this.
Thank you!
-
Reading TCP does not detect the network closed conncetion error (66)
Hi dear all,
Instead of LAN I use WIFI to connect PC and mobile. Read all communications and write operations are performing ok. But the only problem I am facing is that once I disconnect the network from a mobile phone connection my labview TCP read operation does not detect it and only timesout at the specified interval. Although for Bluetooth connection network if I disconnect mobile then BT read detects it as network conncetion closed in error by peer (66).
Can someone help me on this.
Thank you & best regards
Zdzislaw qureshi
Hi Zdzislaw,
The behavior you're seeing is expected for TCP as the device will timeout while it is looking for the connection close the connection. This Wikipedia article explains how TCP protocol works in relation to a handshaking procedure four lanes running in order to close a TCP connection. I hope this helps!
Kim
-
Reading TCP does not work sometimes
Hi all, I have a problem when my .exe build does not work on some computers, but works fine on others. It uses a tcp connection to grab data out of a custom server program that stores data bluetooth. The construction of program works fine on my development machine, but also another office, but on a 3rd computer code simply does read the data from the server. I have disabled the windows firewall, but I have no idea what else to try - someone has this problem before?
That tells me that there is a driver that you have not installed on the other computer. LabVIEW 2013 tries to automatically determine what drivers you need when you configure a Setup program. This question does not sound as if she had something to do with TCP/IP.
-
Guys,
I am looking for a single document that describes the configurable timeouts in the PIX for the following:
(1) TCP half-closed connections
(2) connections,
(3) half-closed connections
I remember seeing a table describing these (delays in waiting or limits-embryonmic) settings, but I can't seem to find on the site now.
Thanks in advance for your help,
Vito
Ahhh, finally got there. No, the half-open connection timer is not configurable. It is however for 2 minutes. That means that, as soon as we get the initial SYN packet in, the second has mons 2 before delete us it.
And no problem on the long thread.
Scott
-
Hello
I am tryting to change TCP Communicator - Active .vi as it generates only a single string instead of concatenated strings. At the moment program is just concatenate strings. I have
seeking a chain latest to the port. So when it receives the channel 2 it must purge the chain 1.
It comes to string1. (I have to perform certain functions of string on it and get a result from here)
It comes to string2. (So when I get that channel 2, channel 1 must have been emptied and string2 is only left so that I can perform the same operations on this string also.)
I tried but without success.
Thx for your help but I found easier practical solution. I just changed the standard TCP CRLF playback mode. And now I can get single complete strings directly from port
THX
-
Hello
I want to read a string of NMEA (1 Hz update rate) of a server. The original NMEA (series, 4800 baud rate) is converted by a MOXA to TCP.
Here is my minimum program, I normally have a timer "wait until 1000ms" inside.
The problem is that the MOXA closes its other port every minute. I can still read, but everyone else is blocked.
Other Terminal programs work. The network guy told me that he sees a lot of traffic from my address and he thinks that, at some point, the MOXA is confused and shut its ports.
Is there a possibility that read TCP sends a string of status or failure?
azavarsky wrote:
Hello
I want to read a string of NMEA (1 Hz update rate) of a server. The original NMEA (series, 4800 baud rate) is converted by a MOXA to TCP.
Here is my minimum program, I normally have a timer "wait until 1000ms" inside.
The problem is that the MOXA closes its other port every minute. I can still read, but everyone else is blocked.
Other Terminal programs work. The network guy told me that he sees a lot of traffic from my address and he thinks that, at some point, the MOXA is confused and shut its ports.
Is there a possibility that read TCP sends a string of status or failure?
How fast this device sends its strings? -What is simply spit data without any query command to be sent? If so your Moxa can be a problem too, because he doesn't know what to do with the data if there is no client connected to read. Also your Moxa converter can struggle to serve more than one client TCP on port even anyway. What should you do if several clients try to access the same port? Send the same message to everyone? Or send the incoming message randomly to one of them?
Do you get your TCP read once errors Moxa "closes" the port as you say? If so you should terminate your loop on any error except maybe a timeout error and reopen the port in a second outer loop until your program wants out. Your loop never stopping on the errors will prevent the close TCP to run that will keep open socket and prevent the Moxa to see good handshake that the connection has been properly closed by the customer, which will probably prevent the Moxa device able to accept new connections. Network communication can be tricky and one of the first things you have to learn is the appropriate error handling. No matter what mistake anywhere in the network connection, usually error timeout on reading, with the exception should be managed by closing the connection and tries to reconnect.
-
Control and Simulation in a loop / while loop with TCP/IP reading / writing of synchronization
Hello, I have a problem with reading TCP/IP and written in two loops. The problem is NOT to get the two loops to read and write to and from the other. This has been accomplished. My problem is when I run control and the loop simulation on my laptop and the while on a RTOS remote on the controller on-Board of LabVIEW in a remote PXI chassis, the while loop the remote system running on four 4 times faster than the loop control and simulation on my laptop. In other words, for each iteration of the loop control and simulation on my laptop, there are 4 four iterations of the while loop on the remote system. I need to know how to get a degree of kinship (1:1) with these iterations of the loop. When I run a longer simulation in real time, say 10 seconds, the control and Simulation loop begins to slow, i.e. the simulation time slows down until it is no longer in real time and the "Late Finish"? Parameter is set to true and the LED lights and continues to stay lit. At this point, the system destabilizes due to what I believe is being well sampling rate too discreet and I have to end the simulation. How can I get a ratio of one to one between the loops and also to avoid slowing the loops causing destabilization?
To give an overview of my application, I implement a control system in a network, seen in "image2.png". This is achieved using my laptop as a subsystem 1. Reference signals are generated from the laptop and the error signal is produced. Control measures taken and the control signals are sent via TCP/IP to the remote system. Position feedback is returned, and the process repeats. My system has Core I7 Procs w / 3 GB of RAM, up to 1 GB/s speed via ethernet and LabVIEW 2011 installed with all necessary modules and networking tools. The attached VI Custom_Wireless_Controller works on my laptop. The remote system I'm working on that has the 7830 NI R Series with FPGA card. OTN runs on the PXI chassis with an enbedded controller that has networking capabilities of up to 100 MB/s via ethernet. I use the FPGA for the acquisition of data and apply control signals to my plant. The plant is the PCE twist connected to the FPGA through the cable of the ECP - RIO of NOR. Subsystem 2 is this side of the CNE. The FPGA collects position, he sends to the controller via the network, receives signals from the network drive and writes signals to the plant power amplifier that operates the plant. This process is repeated and the VI and is titled Custom_Wireless_Plant.
I appreciate the help really and look forward for her and for any question!
Well, the first step is to understand what you have set up right now. Your control and Simulation loop on the side of the controller is configured as 'Runga Kutta 4' and you have a loop timed on the other side. In addition, you have the primitives of TCP/IP on the control and the Simulation diagram and means he will perform (a message) on the size of each minor step, which in your case is 4.
So, you have two options:
1. replace the Solver side controller Runga Kutta 1 (this must synchronize loops)
2. hold RK 4, but create a Subvi around two primitives of TCP/IP and configure from the VI to run than the major (continuous) step-size. If you do it right, you should see a 'C' on the upper right part of the VI you have created.
Please let me know if what I said is not clear...
-
Hello! I have a small question on ports TCP read palett in labview, im trying to send 1 bit from a server to a client. This works when I put 4 digital in the bytes to read TCP entry read client-side. But when I change the value to 1, as it should be efficiant, this work dosent. Any ideas?
Your number of bytes value is a number of I32 (32 bits, or 4 bytes), so you send 4 bytes followed by 1 byte for the boolean itself. You can convert the number of bytes in an I8 to make a byte (but I wouldn't bother because the IP header information is the number of bytes, which means 1 to 4 bytes means little).
-
TCP/IP read returns new data with a huge delay
Hello
I did a server using LabView application. The application translates simplified data of a device and translated them into more complex protocol with another party. The problem is that responses from my application take too long. I tried to analyze the response time in wireshark, and the NIC accepts data in time, but the function "Read the Protocol TCP/IP" labview returns with delay, sometimes several seconds.
The application uses asynchronous calls to perform the communication for each parallel of client modules.
I had a nonreentrant function reading tcp/ip common to all modules of communication cloned, while they were blocking execution for the other
 (facepalm).
(facepalm). -
Hi all
I'm new in the world of labview and trying to build a VI that sends commands to a controller of the WAGO 750-881 at regular intervals of 10 ms.
To set each of the WAGO comics at the same time, I try so to send the Modbus fc15 command every 10ms using Labview standard TCP write module.
When I run the VI it works for about a minute before receiving an error message 56 telling me the TCP connection has expired. This strange thought, I decided to record the number of bytes sent via the TCP connection while running the program. In doing so, I noticed that the link broken after exactly 113655 bytes of data have been sent each time.
Thinking can I have sent too many messages, I increased the delay of the loop of 10ms to 20, 100 and 200 ms, but the error remained. I also tried to play with the TCP connection timeout and the writing TCP timeout, but none of these had no effect on the problem.
I do not see why this error occurs, such as the program works perfectly up until what brand 113655 bytes.
I've attached a screenshot of the base VI (simply showing a MODBUS command sent every second) and a more advanced VI (where I am able to control each of the WAGO manually by setting a frequency at which the DO is to switch between ON and OFF).
If anyone has any ideas on where the problems lie, or that I could do to debug more program this would be greatly appreciated.
AvdLinden wrote:
Hi ThiCop,
Yes, the error occurs after exactly 113655 bytes each time. Time-out control, I would like to use is 10ms, but even that will rise to 1 s or 10s does not error, which leads me to believe that's not the issue (as well, do not add any delay in the while loop, so let it run at the maximum speed showed that the TCP connection is able to send all the bytes 113655 in less than 3 seconds again directed towards control of time-out) is is not the issue here).
I tried the suggestion of Marco but having difficulty to translate the string returned in a readable string (rightnow the answer given is "-# +" ' ").
As for your second suggestion, I've implemented something similar, where I created a sub VI to establish a TCP connection, send a message and then close the connection. I have now to build each message and then send the string to the Subvi, which sends the command to my application successfully. While not the most elegant method to solve the problem, it solves the problem of time-out, which means that I am able to send as many orders as I want. So in this sense, the problem has been resolved.
If you have advice on how to properly read the TCP read the output, I want however to see if I could not get my first program to work because it is slightly more robust in terms of timing.
MODBUS RTU TCP is a binary protocol, as you show in your base VI, where you put in the form the data stream using byte values. So you have to interpret the returned answer accordingly with the Modbus RTU spec in the hand. Now what is probably happening is that the connection is suspended after a while because you do NOT read data from the device sends as response to your commands. The TCP/IP stack cushions these bytes and at certain point of overflow internal buffers and the connection is blocked by the battery. So to add playback of TCP in strategic locations (usually after each entry) is the right solution for this. Is there a reason any that you do not use the PROVIDED Modbus TCP library?
-
Tips for the TCP wait of asynchronous Messages with non-standard expression tanks
Hi all
I have a PITA instrument that I need to communicate with in a system of greater control. This instrument communicates via RS232 to a server running on the PC OEM application. In order to communicate with the instrument, I have to use the TCP protocol on a specific port on Localhost - So far so good as long the protcol is answer command.
The problem is that the instrument sends several messages asynchronously of different sizes with a double newline as a tank of termination (there are many CR/LFS all these messages so that they cannot be a MOE) and I am struggling to find a way to manage receive asynchronous messages of variable length with a cusom CHARACTER term. without having simply a fast dedicated for TCP loop reads trying to catch these asynchronous status messages.
I wish the functions VISA TCP has worked with the local host, given that the properties that can be set to change the chariot of non-standard term.
Open to suggestions-
Thank you
Ronin
Yes, I'll be streaming in my own string buffer and then to choose the messages out of the buffer when you find the stop character.
A technique to improve performance, rather than reading a single byte at a time is to use the "immediate" on reading TCP mode and use a high value for the "bytes read" - in this way, it will return all of the data that is there without waiting for all the specified bytes or the time-out. He will wait only the full timeout if 0 bytes are received (which you can ignore) - set to a low value such as 100ms.
Maybe you are looking for
-
IPad mini 4, how do you choose language and get rid of correction
I want to get rid of the corrections to my typing and select my own preferred languages. I didn't find the place where these two settings are possible. On my iPad mini, french french seems to be the desired language so that when I type in English I
-
Please help me get back Firefox in "normal mode". He changed in full screen, which means that I have no control over whatsoever. Thank you
-
Satellite C660D-10W - 02 wireless broadband does not connect
Hello. I bought a new computer toshiba laptop, its called a Satellite C660D series Satellite C660D - 10W.Then I installed the modem 02 top wireless broadband.He showed a shortcut for 02broadband on the left side of the desktop.So far everything was g
-
G72 laptop Extended life battery prob
I replaced my old battery (4000mAh) 6cell battery 12 cells (9000mAh). When I installed the battery and plugged my old charger he indicated that 71% remaining (not plugged in charge). charger works on battery. I ran the boot f2 on a battery test it in
-
Hello I have followed several threads on this forum because it seems that my USB port problem is not new. I have a Pavilion G6. I get the same message everytime I try: "Windows cannot find the device drivers for your computer. The laptop came with Wi