Connect two targets in real time via TCP/IP
Hello everyone
I need to connect two targets of RT on TCP/IP protocols
I have two sbRIO Council related to a single host PC through an Ethernet router
and I have two IP address of these two targets, how do I RT - RT ping using the TCP/IP protocol...
Thank you
Syed irfan
irfan789 wrote:
As I am with RT if the IP address of the two targets has a role to play in this communication via TCP/IP
In order to open a TCP connection, you must provide the IP address of the remote computer. It does not matter what operating system, the remote computer is running. If that does not meet your question, so I don't understand what you're asking.
Tags: NI Software
Similar Questions
-
Browse the contents of the hard disk of the target in real time
Hello
Is there an easy way to browse the content of the hard drive on a real-time target by using the file path control (or another type of control)?
What I have in my application is a PC real-time desktop (running on PharLap) who has a Main.vi running on it. There are a few configuration files (for this VI) I want to be able to read and record to that would be stored on the hard drive of the target in real time. However, when the application runs and I hit the Browse button, it displays the contents of the Windows machine and not the machine in real time. Is there something I'm missing?
Please note that I can send via FTP on the Windows computer to the target in real time and can interact with the drive of the target in real time without any problem.
Thank you.
Mike
If you LV 2013 actually use WebDAV screws thus:
http://digital.NI.com/public.nsf/allkb/4EBE45E8A816B19386257B6C0071D025
http://zone.NI.com/reference/en-XX/help/371361K-01/lvcomm/WebDAV/
-
Re-use of dynamically called code of target in real-time on PC
I have a code that is deployed on a target in real time what I call dynamically. I also want to use the same code dynamically on a PC in the same project.
This works very well when you run interpreted code in form. However, I can't add the dynamic called VI to build on my PC specification if the VI is under the aim of RT in the project. I can only include it in the build specification that is in conjunction with the software to the target of the RT.
How can I use this VI dynamically in the ad for the construction specifications and places without having two copies of it?
I actually found a way using a static reference of vi:
Rather than providing a path to the file of the 'open' vi reference, simply load the VI statically and I then enter its name to open an instance, re-entering. This approach has the advantage of process Dynamics called VI as if it was dropped on the block diagram - I don't have to explicitly include the vi file in the build specification.
-
Problem using USB-6356 on target in real time
I try to use the NI USB-6356 on a SBC I converted to a target for LabVIEW RT. I created a LabVIEW RT project with the Architecture of Communication continuous model. However, when I select target RT > New > NOR-DAQmx channel, the wizard says "no device found support.
Here's what I've done so far:
- Installed Support in real time on the host computer.
- Installed OR-DAQmx 15.5.1 on RT target (it is visible when I develop the 'software' under the lens of RT in MAX). See Fig1.png and Fig2.png.
- Verified that the NI USB-6356 appears in max under target RT > devices and Interfaces. See Fig3.png.
Even if the NI USB-6356 appears in MAX, it seems suspicious that it appears as a USB device generic (like the keyboard and mouse that are connected to the target RT). Maybe it appears that way because it is connected to a goal of RT, but it seems that it is not recognized as a DAQmx device. I don't know how get the target RT to recognize as a device DAQmx, given that the appropriate drivers, etc are installed on the computer host and target RT.
Thanks in advance for any help!
Sorry to be the bearer of bad news, but the devices USB DAQ (other than the USB cDAQs) are not supported on PharLap targets at the moment. The documentation could certainly be clearer, so I'll update soon to reduce the confusion on this topic. This white paper, last updated in 2014 is clearer than we currently have. It is also explained in this KBQ5, but the wording is certainly a little bit clear here.
I'm not sure of any other solution that exchanging your 6356 for cDAQ USB system, or the displacement of a BONE no - RT.
-
Dialog box to open the file on the target in real time
It is possible to load data from a file on a local PC to a VI runs on an RT target? I have a RIO OR the VI running on. From the front panel, I want to be able to click a button and have a dialog pop up where I can choose a local file to load data from. The problem is that when I try to use the spreadsheet VI load data it returns an error indicating that the dialogue has been canceled. If I use the express VI from file dialog, the VI will always return true to cancel. The dialog box never appears. It is not possible to open a local file to a VI runs on a real-time target?
Jon VT-
This function will not work in time real (RT). Please see the bulletin 2S9D21OH knowledge base: creation of a dialog box file for use with LabVIEW Real-time for more information on this. However, it only locates the files on the target of RT. If you try to communicate with a file on your host computer, you can be forced to transfer this document to the target of RT, or implement a different architecture for this task. I would also add that given the user to define the source of the file manually create non-determinisme within your system. Again, it is perhaps another reason to implement a different architecture.
-
Is it possible to start remotely apply exectutable on target in real time?
Hi all
My apologies if this is an obvious question - I couldn't get an answer using the search terms I could think of - and I'm quite new to programming in real time.
Is it possible to launch a .exe in real-time without head (or not compiled application on the computer of RT) with the help of a contribution by a distance VI - one .exe running on a portable computer based on Windows for example. I'm currently building an application where my Windows based GUI communicates with the use of machine RT shared variable. However I soon would like to put my code on a colleague who will test the application. I remember that a .exe can be saved in a specific on the RT machine folder such that it will launch at startup. However I prefer to store several .exe on the machine and allow my colleague to choose which launch.
My first thought is to write an .exe wrapper (which will be autolaunch) who can then launch any other .exe saved on the computer using the wrapper. However, I prefer to launch the .exe directly and one at a time if possible - it seems a more elegant solution.
Best regards and thanks,
Dave
Well, there is certainly a way to do it, but NEITHER does not expose this method. However, you can programmatically restart an RT target and also you can use the vi FTP rename the "startup.rtexe" file that will autorun on reboot. Good luck!
-
Photo of Pixmap vi on the target in real time
I need to shoot some simple pictures in real time and display by PXI. The image is drawn with the functions of images in the palette of the graphics and sounds. To view through PXI, I found the RT IMAQ video output in the NOR-VISION package. So I need to convert the type of type picture IMAQ. I searched online and it seems these conversions all requires the 'Photo to Pixmap' vi, which I cannot find on the aim of RT.
Is there another way to convert the picture in picture IMAQ without using this VI?
AuZn,
The picture to Pixmap VI is not supported on real-time targets. The only other method I can find to get the pixmap cluster is to use Image 'Get' invoke node. However, if you plan to build this application into an executable, invoke node won't work anymore, as façade elements are removed in executable RT.
Daniel C.
Technical sales engineer
-
Programmatically determine if the forcing is enabled on target in real time
A HMI application that I'm working, I want to inform the user at startup if the forcing is enabled on the target if all I/O's today obliged. This information is readily available in the Distributed System Manager, but I can't seem to find a way to get this information programmatically. Is this possible? I hope there is a simple solution that I forget.
PSP data items that are automatically published by the engine of analysis for each variable are displayed in the dialog box browse that you have attached to your previous post. As long as you have activated the publication for the network i/o Variable, you should be able to access the information of forcings by reading a PSP Variable with the appropriate URL (for example "ni.var.psp://
/mod1/AI0/ForceEnabled"). Similarly, you might find the value of forcing by reading "ni.var.psp:// /mod1/AI0/ForceValue. That's how the Browse dialog box is to get this information. It's simply display all PSP items present on the network. -
Need help recovering data of the target in real time. Using NI 9233
I have a cRio-9012 with 9233 module. I have recently setup of the software for the computer and the target. I have also gone through and set up the "NI 9233 start-up scan mode" to use on my controller. However I couldn't really get the execution of vis data. Could I have missed?
The VI is executed, but it reads zero while I use an accelerometer (Wilcoxon research model 797-33).
You should consider the specific\ni of Labview\examples\compactrio\module 9233\ examples.
-
Register the event on the target in real time using LabVIEW 2012
Hi all,
It seems that LabVIEW 2012 RT does not support user events. Screws are not in the range of function and the help of LabVIEW says that it is not supported. In LabVIEW 2010, everything seems fine.
That's happened? We need this feature.
Thanks in advance.
Hello
Thank you very much. We will use this workaround, which is not a lot of work if you know what to do. Develop a VI on workstation and the execution of switching left target to the low edge also implements the correct block as well as feature diagram objects.
This can be fixed in the next patch-Patch because a lot of users could by irritated by this behavior?
Thank you
Tyler
-
Slow down the host Communication target in real time
I start with Labview RT.
I wish that tor gave reading a thermocouple signal, then sending to host VI. It works, but to slow down.
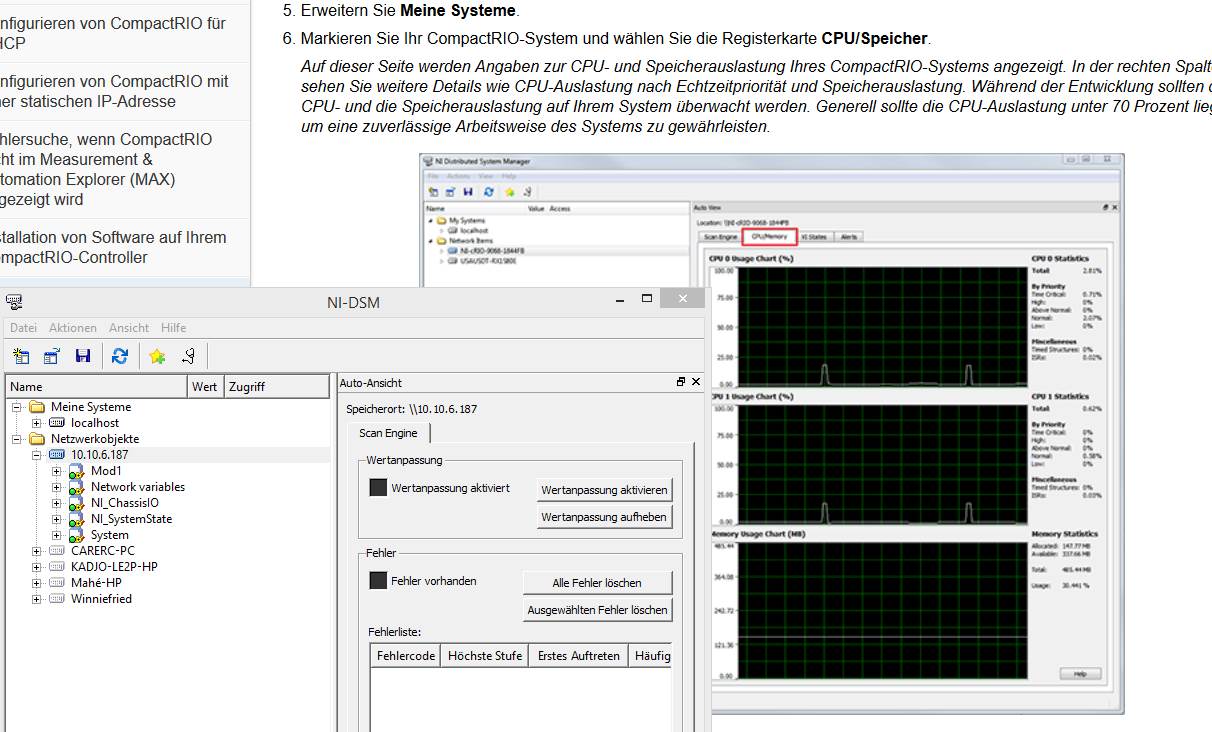
I tried to look at CPU, memory usage, but it's my second problem. The DSM does'nt contain functions should be.
Am I missing a special configuration?
Published network shared Variables are slow, especially in a high-traffic network. I recommend that you use a network stream and set up your own communication scheme capable of handling the output rate higher.
-
Structure of the timed real-time event loop does not work
I'm a new user for LabVIEW. And I've encountered a problem that frastre really me! Hope someone can help out me. Thanks in advance!
I just want to use the structure of the event under timed loop, which is important in my extrmely design.
However, this works very well in my computer (without connecting to the FPGA).
Once I connect it to the FPGA, then I can still run but there is no response!
My file is attached. Please someone help me!
Looking forward to your answers!
The FPGA runs headless. Structures of the event won't work. What you need to do is to have an application on your host computer when the user presses a button, changes a value, etc.. This event should send a message via TCP/IP for code that runs in real-time environment. Then the real time environment should attribute to the desired value a control on the FPGA.
As a general rule, programming real-time with FPGA has several layers.
(1) host-> handles interactions with the user code and communicates the code in real-time via TCP, UDP, etc.. Displays the user sent by RT controller data.
(2) code in real-time-> tracks headlessly. Manages host code messages, processes the data of FPGA, communicates with FPGA much as the host code communicates with the code in real-time
(3) FPGA-> no acquistion and passes through PEP in the RT
The first thing you need to do is to understand the architecture and how all these pieces of the puzzle work together before you throw things down on a diagram.
-
Why is-Web application server on a target at a distance in real time is not start?
Hi, I need help urgent please
I was wondering why the Web application server on a target at a distance in real time is not start?
The target is 9014 real-time and its connected to a local network abroad, I have a public IP address port forwarded to the local IP address of the device (Network Address Translation) with all open TCP/UDP ports. I can log on remotely over the internet using the public IP address to the device configuration page and change many settings. Whenever I have activate the Server Web applications and made port 8080, worth defaults to 0 after the reboot of the target.
The admin login I use has all permissions to control the unit.
For this reason, I have a problem, deploy web services remotely through the project after building it as it happens with the following error.
"Web Services deployment failed. You must start the application Web server OR before you deploy a web service.
I have attached a few screenshots
Thanks for the help
I had someone to plug his laptop to the same network as the cRIO, logmein used to connect remotely to the laptop, I had to download labview and the software needed for the cRIO in the computer, and then with the help of MAX, I reinstalled the software on the cRIO. The port of the web server application 8080 is now activated and I was able to deploy services web ok.
I wonder why I can't use MAX distance to reinstall the software on the cRIO.
The cRIO is installed on a private overseas network (192.x.x.x), then I have a public internet IP address (67.x.x.x) mapped to the private IP address of the cRIO (Network Address Translation). I can connect to the cRIO config page using the address 67.x.x.x, but not via MAX
If I find target real tiem using the Ip address of 67.x.x.x, sometimes with the private static IP (192.x.x.x) located on the cRIO but it shows disconnected status
I wonder if someone has an idea how to go about using MAX to reach the target in real time on the internet
Thank you
-
Debugging on a real-time target - deployment issues
Dear community,
After RT my 9651 sbRIO module wiring code, I do tests to check the intended functionality. For this I start my main VI who deploys the code on my SoM and I can happily move forward with my debugging session.
Sometimes, however, while in the process of deployment, I get an error saying:
[VI - name] .vi loaded with errors on the target and was closed
When I open the VI it has no errors and the VI should work a fine might think.
My solution was so far of the VI, just open move the wires and terminals round, re - save the VI and this is the deployment works.
This trick worked for a while, because deployment error ca occur arbitrarily on different VI making debugging quite cumbersome.
I then went ahead and just run the wrong VI in RT mode by moving terminals and structures around to get the VI runs in mode debugging, but it is very time consuming.
Given that 3 people working on this project and we use git-subversioning I also do not want to "touch" each time just screws for the debugging session will without actually modifying the feature.
Has anyone encountered a similar experience or perhaps found a magical setting to avoid this subject a lot of time?
Hello
If solutions already present Spex does not do the trick for you, clearing the cache of the compiled object can help.
For more information, take a look at the following link:
Why my screws are loaded with errors when it is deployed at my target in real time? -National Instruments
http://digital.NI.com/public.nsf/allkb/7F6502FF0560FA9086257EB3005B13BAConcerning
Alex
-
where the daqmx on real-time target files are stored?
Hello
I'm working on an application that is embedded in a desktop RT target. To make the system easier to maintain in the future, I would like to be able to generate a DAQmx task programmatically to the *.ini file exported from MAX. In this way, users don't know what my code does to recalibrate the sensors or manage new material; they only know how to use MAX and where to store the files in config on the target.
Where are the task daqmx, channel, and scale information stored on an RT target? I have been through the files on the target you are looking for something that contains my task data but have found nothing, while dropping a node of system property in a VI running on the target will give a correct list of the tasks that I set up. (The project that contains the aforementioned VI has no tasks in it IE: I do not import into the project.)
Is there a utility that runs on the RT target that can generate a task at the time of the *.ini files exported?
Thank you
Exahustive keyword search led me to an answer on the forums. I'll post here a brief summary in case someone else uses the same key words I.
1 export the MAX configuration file
2. write a VI that uses tools in the system palette to load the configuration on the target in real time.
3 profit.
In my case, the VI I wrote to download the config DAQmx also generates the configuration files for the screw on the side host and target, so everyone knows what is called tasks.

Maybe you are looking for
-
Satellite U500, replace the DVD RW with Blu - ray?
Hi all Can I replace my Satellite U500 DVD RW with blu - ray or blu - ray rw? and if yes where can I get the part from? or where can I buy origenal Toshiba parts or parts? Thank you all
-
8 stream cannot use windows apps
I can not open all of the windows on my stream apps 8. Do not know why. I can't even open the pc settings. Someone knows why? The error it gives when opening mail or calendar is "this application cannot open. Theres a problem with * app name *. Conta
-
How to create 2D table using the table 1 following d? Table 1 d is of 0.14, - 1,1,15, - 1,2,14,15,-1 2D table should be 0.14 1.15 2,14,15 When you use insert in the table it needs the same dimension and therefore deletes the last row 2.
-
toolbar at the top of the page is no longer a file, edit, view, etc. - how it back
did something that removed most of the toolbar at the top of page-can someone help restore
-
Update for AMD driver graphics high definition
I have a HP Pavilion g6 Notebook LW350UA #ABA 64-bit Windows 7 operating system. Tune is offer me an update for AMD driver graphics high definition. It crosses the slip with the Green checkmarks next to them all the way to the end of the download.