HTTPConnection - reading of the response data
Here's what to do:
HttpConnection conn = null;InputStream is = null;try { conn = (HttpConnection) Connector.open("http://..."); is = conn.openInputStream(); // process the input here} finally { if (is != null) try { is.close(); } catch (IOException ignored) {} if (conn != null) try { conn.close(); } catch (IOException ignored) {}}
Tags: BlackBerry Developers
Similar Questions
-
Reading about the digital data into the Scanner, followed of a string
I am a student, new to Java and will be picking up in the semester at College next.
I did my self-study using online tutorials and noticed that when I do this:
Entrance to the parser = new Scanner (System.in);
System.out.Print ("enter a number :");
Try
{
double d = input.nextDouble ();
System.out.println ("the number is:" + d);
System.out.Print ("enter a number :");
String s = input.nextLine ();
d = Double.parseDouble (s);
System.out.println ("the number 2 is:" + d);
}
catch the exception here irrelevant code
Reading the data for education String s = input.nextLine (); is ignored. I guess it's because of the character "\n" remains in the buffer, am I right?
My solution would be to put a statement (); input.nextLine before the String s = input.nextLine (); and it works. But it feels inelegant to remove the newline like that. Is there a suitable or more 'recognised the market' best way to do this?863720 wrote:
I guess it's because of the character "\n" remains in the buffer, am I right?Yes.
My solution would be to put a statement (); input.nextLine before the String s = input.nextLine (); and it works. But it feels inelegant to remove the newline like that. Is there a suitable or more 'recognised the market' best way to do this?
It is the "standard". I wouldn't be too worried about this, the Scanner also is widely used in the real world as tutorials might make you believe.
-
InputStreams for HTTP [S] response data: confirm a minimum memory buffer/reading early?
I need to manage data from a web service response. The format of the response data is under my control and is returned as a stream (net.rim.device.api.crypto.tls.TLSInputStream) to my BlackBerry application. The content of the feed is an XML stream that contains simple header information and then one or more 'chunks' of data. The data is compressed (gzip) and coded (Base64). BB app must decrypt, decompress, and then process the data in the stream. For the purposes of my application, I never need all of the data at a time; processing flow for real, that's what I'm looking for. I've implemented a pipe which, in pseudocode, looks like this:
SecureConnection httpsConn; already implemented
InputStream httpsStream = httpsConn.openInputStream ();
InputStream compressedStream = new (Base64InputStream.decode (httpsStream));
InputStream is = new GZIPInputStream (compressedStream);
int aByte = is.read ();
The goal is to put buffer in the bit data as possible so that the operation on the side of BB is not intensive memory as the data grows. The effective implementation of this pseudo code works very well.
The question I have is: I can confirm that the httpsStream I have created from the httpsConn is completely not himself read the BB in the specific RIM code? In other words, if there are 20 MB of data in the stream, I don't want to know that the stream has read data HTTPS completely - 20 MB all - and then put at disposal. Instead, I want to know only as much data is consumed as I makes (is.read) as well as a small buffer, perhaps, for the effectiveness of the network. A third way to ask the question: I think that it is supposed to be the definition of a well implemented InputStream, but I'm having a hard time finding a definitive '' Yes, J2ME (or BB) InputStreams promise to read HTTPS data on request and not all at once.
I expect tons of streaming audio and video apps are partial evidence that works real data on the fly on the Net. Still, I left the details as XML processing by SAX - it's one on the behavior of the InputStream HTTP [S]. But it brings the fourth way to phrase my question: if I use SAX instead of a tool of DOM to treat my HTML because I want to monitor the pressures of large data flows, will I get cancelled by buffering I can't control in the low-level InputStream HTTP [S]?
Before you say, ' HTTP [S] is not where you should make streaming ", this is not streaming in itself. It is instead one - possibly large - answer to a POST. Highly 'typical' web interaction
If changes in response based on the version of the OS, presumably 4.6 or better is the target platform.
Thank you!
-Del
I don't remember the said documentation. All I remember is that I proposed of workaround to someone on this forum and they later confirmed that he has solved the problem of buffering (they were streaming audio as great answers HTTP - streaming started to work very well, without a lot of latency).
-
Hi guys,.
I am trying to use CD get time response data VI my VI. When I choose the pair of input-output, I can get the response data determined by the digital input to the output value. However, I need more of a pair of response data. I try to use the list of input-output, but there is no output data and response time of the VI with table 1 d of numbers.
My question is how to use the CD get time VI data response with the list of inputs-outputs configuration? Thank you.
Hey, Shapiro,.
I think the problem is you have two 0 items in the above table for you will be out this definition data twice. Let me know if this does not solve the problem for you.
-
I searched it and found another thread, but I did not understand where to put the response code that was found as a solution. I also thought that if I replied to this thread I would probably not get very much help since it is more than half a year and was marked as resolved.
Here's my C++ code:
void App::InvokeCamera() { bb::system::InvokeManager manager; bb::system::InvokeRequest request; request.setTarget("sys.camera.card"); request.setAction("bb.action.CAPTURE "); InvokeTargetReply *targetReply = manager.invoke(request); }I want to retrieve the path of the saved image so that I can access it in my application.
What and where should I put the response data?
Kind regards
It's its own method. It's using Qt signals and Slots feature. You can read about it here:
https://developer.BlackBerry.com/native/documentation/Cascades/dev/signals_slots/index.html
It is quite fundamental to development in stunts, so I strongly recommend that you develop a solid understanding of it.
For example, you can try https://github.com/blackberry/Cascades-Samples/blob/master/invokeclient/src/app.cpp and https://github.com/blackberry/Cascades-Samples/tree/master/invoketarget
-
Error message 'invalid base64 in continuous response data' when you try to access the mail server
Under Thunderbird 16.0.2 Mac running OS 10.5.8 that worked perfectly for 6 years. Today I suddenly can't connect to the mail server Westnet (Western Australia). Automated or manual sending my password Gets the response "the password sending has failed. "Mail server mail.westnet.com.au replied: data not valid base64 in continuous response.
I always have access to the web and can access my email via the web portal of Westnet or using the Mail from Mac client. Using Thunderbird but I can not connect.
This sounds like the server think your already logged in. Try to turn off the machine for 10-15 minutes and have a cup of tea. This should be long enough to force a timeout if there is something hung up at the end of westnet and try again.
-
data has been replaced before it can be read by the system
Hello
I use a flow sensor that creates a frequency output and which connected to my PCI-6035E. When I run it, it works for a few seconds and then gives an error. Error 200141 ' data has been replaced before it can be read by the system. " I also tested with a pulse rather than the flow sensor generator, and the error only when I changed the frequency. How can I solve this prolem?
Thanks in advance!
Thank you for your answers, Bob.
I got it now works, the problem was that I was using continuous samples. I am now a single sample with a while loop and it works.
-
Fluke Hydra 2625 with NI LabVIEW drivers: can not read the output data
I work with a Fluke Hydra data logger 2625 have downloaded the drivers from NI LabVIEW, crossed the config., initialize and modes files and now trying to read data from a thermocouple.
Initially, I was getting an error message ("17" I think) but now, after correcting the port numbers, the recorder data and LabVIEW seem to communicate without error. I would like to know where I should look (in the panels before different drivers) for temperature data output.
Any advice would be appreciated at this point. Thank you.
There is a driver not supported here. I have the instrument and you have not used one in quite a few years, but if using the example, the function can be set to temperature temperature with the 751 RTD or thermocouple. The results indicators min/max/last.
The pilot could really benefit from a full rewrite, but it seems that most of the basic functions are there.
-
The data read into the buffer HAVE lack samples at the beginning
I use a box USB-6251. The program implements two channels of AI (read I and Q) on a single task and one channel on another task. The channel uses the ai\SampleClock as its clock, so that both are synchronized. C creates a digital pulse periodic rising edge (a clock basically) which is used as a trigger on an external function generator. The signal from the unit after going through some material, external signal processing is ultimately what is read by the channel of GOT it.
We know from the relevant signals, they seem to be correctly synchronized scope. IE, the analog signal to read arrived on the channel of the AI of the acquisition of data more or less instananeously when the trigger is activated. If there is a delay, it is of the order of microseconds.
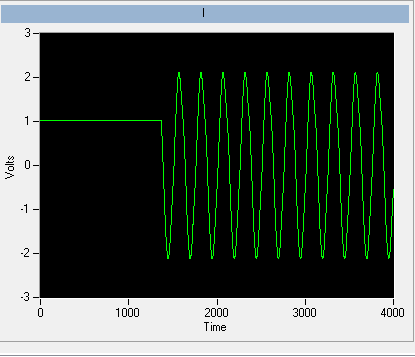
However, when I read in the buffer of HAVE (repeated FiniteSamples), waveform, I always come back has a section of samples at the beginning that seem to be returned of the first actually read data-point (see attached image). This delay is of the order of milliseconds (it varies with each series).
I want to totally eliminate this delay. The signal should be a sinusoid which begins to sample 0 and is continuous through until the last sample read.
I put the code below.
Installation program:
Create analog read the task
analogReadTask = new Task ("analogReadTask");Create the virtual channel for the component I
analogReadTask.AIChannels.CreateVoltageChannel (initParams.AddrI.ChannelAddress, 'I', AITerminalConfiguration.Differential,-4, 4, AIVoltageUnits.Volts);Create the virtual channel for the Q component
analogReadTask.AIChannels.CreateVoltageChannel (initParams.AddrQ.ChannelAddress, 'Q', AITerminalConfiguration.Differential,-4, 4, AIVoltageUnits.Volts);To set the clock for the analog readings
analogReadTask.Timing.ConfigureSampleClock (string. Empty, initParams.SamplingRateHz, SampleClockActiveEdge.Rising, SampleQuantityMode.FiniteSamples, Totalechantillons);Create the mult-channel drive
analogReader = new AnalogMultiChannelReader (analogReadTask.Stream);
analogReader.SynchronizeCallbacks = false;pulseWriterTask = new Task ("pulseWriterTask");
Creating a digital output channel that provides the trigger to the U/S system
pulseWriterTask.DOChannels.CreateChannel (initParams.AddrUsTrigger.PortLineAddress, "US trigger", ChannelLineGrouping.OneChannelForEachLine ");
pulseWriterTask.Timing.ConfigureSampleClock ("/ SampleClock/AI/Dev1", initParams.SamplingRateHz, SampleClockActiveEdge.Rising, SampleQuantityMode.ContinuousSamples, samplesPerPulse);
pulseWriterTask.Stream.Buffer.OutputBufferSize = samplesPerPulse;
pulseWriterTask.Stream.WriteRegenerationMode = WriteRegenerationMode.AllowRegeneration;pulseWriter = new DigitalSingleChannelWriter (pulseWriterTask.Stream);
pulseWaveform = new DigitalWaveform (samplesPerPulse, 1, DigitalState.ForceDown);
pulseWaveform.Signals [0]. The States [0] = DigitalState.ForceUp;analogReadTask.Control (TaskAction.Verify);
pulseWriterTask.Control (TaskAction.Verify);
From reading:
analogReadTask.Start ();
Start writing the digital pulse, however it will not start
until the AI/SampleClock begins, so implicitly synchronizing the two tasks
pulseWriter.WriteWaveform (pulseWaveform, true);analogReader.BeginReadWaveform (Totalechantillons, readerCallback, analogReadTask);
Result (should be a sinusoid from end to end)
Always seems to solve these problems, shortly after their validation.
The problem has start the digital task AFTER the analog task. In the small delay between the two lines of code running, read analog had already begun, and so some of the impulses of the AI/SampleClock were missed by the task. The order of departure between the two tasks of switching solves the problem.
-
Question about reading the hex data
Hello! I'm a Novice of Labview and have a problem with reading the hex data.
Basically, I bytes from the serial port like this: "80100E0E0AB4F646F24A00911267087E032080057FFF."
It is not encoded in ASCII. What I want to do is to convert a hexadecimal string ASCII of the hexagon.
so that the chain would become of ASCII hexadecimal numbers.
I think that the following might be a solution, but I have no idea what the Subvi is in the solution.
http://forums.NI.com/T5/LabVIEW/hex-string-to-ASCII-hex-string/m-p/886078/highlight/true#M400462 Thanks in advance and I thank you for your kind help!
coolmatthew wrote:
What I want to do is actually this.
You use too much a lot of code for all this. All you need is a concatenate strings, replace your entire and other loop. Same result.


(See also)
-
Slow data transfer during the reading of the GPIB (Horiba CCD 3000) device
Hello to everyone.
I'm trying to connect with a CCD camera (CCD 3000 - company Horiba (formerly Jobin Yvon)))
The connection is made on the GPIB (PCI)
The CCD device is old enough and will not support orders GPIB standard (p. ex. * IDN?)
The problem I have is that after I take a picture, when I want to read data from the CCD
It takes about 10 seconds before arrived it all the data to the computer
the delay is proportional to the size of array of pixels:
When I take the data of the entire area of the CCD (1024 * 256 pixel * 16 bits = 512kB)
It takes 10 seconds
When I consider 4 x 4 pixels 1 pixel (this is done by the hardware) (256 * 64 pixels * 16 bits = 32 k) it taks about one second
What can be the cause of this kind of problem
How can I solve it?
Thank you
As you say, the camera is quite old. Maybe 50 kB/s is the maximum data rate (probably very 56 Kbps).
-
REST error response, the BODY data include
I use the REST Web Service to build an API for a few screws
I want to do the following:
- If an error occurs, then change the answer as it is '500' or some non-OK answer.
- Include error information in the return data (error code, etc.)
I have 1 above by composing the response Code of HTTP Set VI. However, when I do this I am not able to return data (the body is empty).
Is there a way to return data while also affecting the response code to a non-OK response?
If this isn't the case, then I must always return '200 OK', even if the errors occur and enter an error for each transaction data structure.
To close the loop on this one. If anyone is interested in the follow-up to this request for Corrective Action, the number is 400778.
A work around for this problem is to use the output mode of flow rather than mode output Terminal. This will allow you to write a response and set the code.
KiraT
-
Reading/writing data to files in the directory "data" of the application
I'm trying to write and then read a little data, and it does not work. The size of the file is back by '0' because I wrote the file:
char* ptr = NULL; write_file("./data/test.txt", "testing!"); read_file("./data/test.txt", &ptr); fprintf(stderr, "HERE: %s\n", ptr); void write_file(char* file_name, char* data) { FILE* file = fopen(file_name, "w"); if (file == NULL) { fprintf(stderr, "Cannot write to file: %s\n", file_name); } else { fprintf(file, data); } close(file); } int read_file(char* file_name, char** data) { FILE* file = fopen(file_name, "r"); if (file == NULL) { fprintf(stderr, "Cannot read from file: %s\n", file_name); } else { struct stat st; int rc = stat(file_name, &st); if (rc) { return -1; } long num_bytes = st.st_size; *data = malloc(num_bytes + 1); fread(*data, 1, num_bytes, file); (*data)[num_bytes] = NULL; } close(file); return 0; }Don't know what I'm doing wrong here...
No idea, but a few tips:
- Have you created the directory data?
- Put an exit if the entry is successful, so you can be sure that your code is executed
- Close the file only if opened successfully
- Close the file with fclose. Close may not do and cause it is not emptied, the content can be empty. See http://www.cplusplus.com/reference/clibrary/cstdio/fopen/
- Add a fflush (normally not used) after writing
-
How to extract the response JSON data
Hi all
I get the following response from the server.
"
 "PAO - ENV ="http://schemas.xmlsoap.org/soap/envelope/"xmlns:ns1 =" urn: soapservice "container ="http://www.w3.org/2001/XMLSchema"xmlns: xsi ="http://www.w3.org/2001/XMLS
"PAO - ENV ="http://schemas.xmlsoap.org/soap/envelope/"xmlns:ns1 =" urn: soapservice "container ="http://www.w3.org/2001/XMLSchema"xmlns: xsi ="http://www.w3.org/2001/XMLS
"Chema-instance" xmlnsPAO - ENC = "http://schemas.xmlsoap.org/soap/encoding/" SOAP - ENV:encodingStyle ="http://schemas.xmlsoap.org/soap/encoding/" > ""
tAdvertismentReturn xsi: type = "xsd: String" > {'MSG1': '1', "MSG2": "success", "DA..."}Now, I want to create a QVariantList using JsonDataAccess.
If I manually extract the JSON string after that
downloadData = jda.loadFromBuffer (data);
so I'm able to get the data.
Without extraction like that how can I take the response JSON data?
Thank you.
Thanks for your time,
Here's my problem how to build a soap with the response object.
I solved this problem with the help of the example of the weather.
Thank you.
-
Loading page elements are disabled and hard to read if the data is there?
Hi all
Request Express 4.2.2.00.11
Oracle 11g
Apex 4.2 theme 26 'Theme of productivity. "
Mainly used IE v8 now.
My question is, on the loading of the page that some fields are disabled but very difficult to read if the data is there.
I tried somehow, like changing the color of background, text color but not very successful again.
Any help please?
Kind regards
RI

Irha10 wrote:
Dynamic ACTIONS
Change the type of dynamic action of disable for Run the JavaScript Code. Make the work of Code:
$('#P1_ITEM1, #P1_ITEM3').prop('readonly', true); // The selector is a list of ID selectors for the items to be made read-onlyChange any existing dynamic action downstream to remove the
readonlyproperty instead ofdisabled.

Maybe you are looking for
-
Disable the notification "Bluetooth connected"?
I was wondering if there is a way to disable the notification ringtone that fires when the Turbo makes a connection with another device bluetooth? My time to chime of notification by default every time that my Turbo connects to the bluetooth in my ca
-
When I opened sites ftp from one of our other offices, I get a screen of login and password. Then the site will automatically open in Internet Explorer. So I go to the Page/open ftp site in Windows Explorer. So I enter my login and password again.
-
I can't change the size of the font on a particular web page
The font size has been reduced, apparently automatically as I can't do anything more, but it's only like a web page, not even the entire site (that's the message from my ebay account page). Does anyone have any idea why or how there to remedy becaus
-
Acrobat 9 Pro (Master CS4 Suite) works not at all after installation
I had to reinstall all my software Adobe CS4 after I restore my iMac any HD issues I had with other things after upgrade to El Capitan (initially before restoring HD no problems with Adobe Acrobat Pro).Now with the own drive, I reinstalled my softwar
-
Another problem of sync MP4 Audio
One of the journalists on the paper sent me a .mp4 recorded on his iPhone via the dropbox folder. Played directly at dropbox on the Mac or the PC, the audio and video are synchronized. Downloaded and played locally with Quicktime Player or Windows