Delay between labview and hp 83620A microwave synthesized Sweeper
Hello world
I'm using microwave synthesized Sweeper hp 83620 has to sweep the microwave from one frequency to another. I control the instrument via GPIB-USB-HS. I use the device provided by Labview driver. http://sine.NI.com/apps/UTF8/niid_web_display.model_page?p_model_id=782
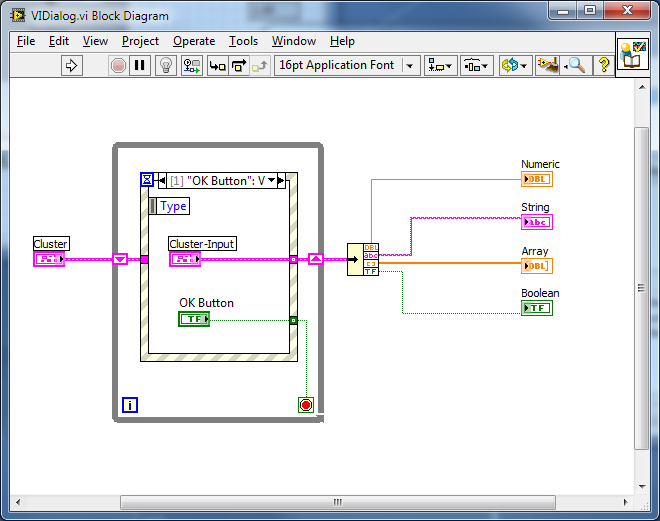
My program tells the instrument, the frequency of start and stop as well as the size of frequency step and downtime. But at some point of time, I want to know the instantaneous frequency that produces the instrument and save it as data, so I built in a virtual meter within the program. But it seems to me that when I hit the run button, it takes time before the instrument scan. This makes the frequency meter reading ahead and save the wrong values.
So nobody knows exactly how long the delay is. It seems that this period is about 1 second, but I need a more precise value have a reliable data acquisition. I would really appreciate an entry and a suggestion for improving the program.
Thank you.
P.S. I have included the image VI below for convenience.
Tom,
When you work with LabVIEW, it is important that you understand its paradigm of data flow. This means not only no function, the Subvi or the loop runs until all nodes input receive data. And no loop will return the results to the output until the loop is completed. So in your case, we just need to understand what the function is in your top string actually starts the scan. If it's the call after the outbreak of arms vi branch simply error on the wire from the loop for. (you can't even wire to something else and please note I said branch it) due to the assistant of the instrument you cannot expect perfect results. If you have not run it with execution highlighting turned on (bulb on the block diagram toolbar) Please try it.
Tags: NI Hardware
Similar Questions
-
Interface between LabVIEW and c#
Hello
IAM trying to send data to Labview via ithernet in a product that already have in c# .net. This means that data send LabVIEW must be posted in c#. Thus the Labview will act as the server and the product in c# will be serving the customer. I have serached in the forums to make the connection between Labview and c#. I saw a tutorial to make dlls in labview, in what they explained to hold tools > Build Application or shared Library.But I can't find in my tools although I version2009 of professional development.
Can someone give me some instructions to send Labview data and display it in c#. IAM attaching the VI Server I made. The client in c# is a great product that has already done by others in c#. I have very less experience of programming in c#. Can someone give me some instructions or attach a few tutorials to make the connection between Labview and c#.
-
Delay between angle and entered analog on a 6221
Hello
my test setup consists of a (8184 current run LabVIEW RT) embedded PXI controller which uses a PXI-6221 of data acquisition. One of the outputs analog of the 6221 creates a demand for speed that is sent to a servo controller. the servo drives then the test configuration. Between the servo and the remaining test configuration, a quadrature encoder is located. Both the 6221 meters are used to measure the position of the servo (using the trains of pulses A and B) as well as the speed of the servo (frequency of A pulse train). In addition to these counter inputs, some analog inputs of the 6221 serve as well to recored the configuration of test signals.
In this configuration, one of the analog signal has a frequency of n periods per revolution of servo (determined by the mechanical design of the test facility). But when I leave the servo turn to for example 100 rpm, then decelerate from status quo with a constant deceleration and then draw the analog signal against the measured angle, I see clearly that as long as the speed is telling, I n periods per turn (or a passage from my analog AC to zero each 1/2n towers); However, as soon as the slowdown begins, the plot gets stretched along the axis of the angle (so the plot tells me there are less than n analog periods per turn, which is impossible because it would require the mechanical destruction of the facility).
However, I can calculate a position based on speed information signal, as I got to the second counter (by integration of the speed). When I do this for the above velocity profile and draw the analog signal against the calculated angle, I see exactly n times / revolution, no matter how fast the installation program is rotating (just the expected behavior).So, apparently, the speed measured is "in phase" with analog signals, while the measured angle has a "phase error. Draw the angles measured and calculated against the time tells me the same thing: the measured angle is always late (compared to the calculated angle). The period is not constant throughout the measurement; I've seen values between 30 and 170 ms within a single record. Due to this change of variable, inserting a delay for all channels, but the angle is not a great idea.
Unfortunately, calculation of the position of the speed signal is no option for me, because the direction of rotation is changed during measurement; because speed information I have based simply on a frequency of pulse train, it contains no information management, therefore a calculated position would be unaware of the changes of direction.
Does anyone have an idea whence thios delay and what I can do to fix this problem?
Try a position different methods of decoding or exchanging the meter channels has not made a difference.Thank you!
Hey Kevin,
attached you will find the last block diagram (no new translation this time, since no changes have been made that require a), which includes your last suggestions (explicitly start the task of AI, remove the excess constraints) with a flat sequence structure that applies all the preparations of task to finish before the start of the first task (I know I could have achieved the same effect of intelligent routing of the signal error, but I think the code is) better readable this way).
Without OPI, LabVIEW tends to start to have, ao and tasks of the angle of the very different moments, which (for some reason that I don't understand - we have a sample clock based calendar here, and the sample clock is run, well after the three mentioned tasks...) tends to cause delays in the order of several 10-100 ms between tasks. With the structure, this problem is eliminated.
The Sub - VI just above DAQmx writing contains the "conduct" code that I used in the last screen shot to "serialize" the requested speeds - in this way, the table that contains the requirements of speed does not need to be rebuilt.
The code that creates a weather channel frequency implicitly timed measure left the VI shown here in a second VI that is running on the host computer, because everything that involves a calculation and does not require any intzeraction with the DAQ hardware is better placed there (the 850 MHz on the PXI controller celeton is slower than 2 definitiely something host GHz Dual-Core system).
The behavior you mentioned for the task "not started" HERE is what wrote using LabVIEW. I thought the block of relaxation that I had at the beginning would treat the start of the task - at least, the code like this figure repeatedly in the examples that come with LabVIEW.
I don't really understand what has caused the problems I've had - it seems that it was the combination of the measure quickly loop iteration with the start of task based on trigger HERE, but I do not understand what are the mechanisms in the background caused the problem (too forced loop was not the cause; the same block diagram works well with an additional loop timer).
If the solution was composed of the following steps:
-remove the old code calculating speed, replace it with a better code out of the main loop. This allows to
-reduce considerably the frequency of the main loop.
-Pull the DAQmx writing out of the loop, and
s ' ensure that all tasks are started explicitly just before the main loop starts to run.
-Possibly remove excess constraints of the main loop.
-
Passing variables between LabVIEW and TestStand
Hello
I'm just learning how to use TestStand and although there are a multitude of resources available, I always find me at a loss on how to pass variables between TS and LV, leaving me to think that there is one fundamental thing that I'm missing which is likely, given that I have a weeks experience with LabVIEW and a days of experience with TestStand.
I took a glance to the example of 'Clusters' to the Code Modules in TestStand examples (I use TS 2016 if it matters) because I thought it would be quite ideal for what I hope. In this case, I hope to be able to pass a string (a file path) to LabVIEW and VI power take this string and use it as part of an order for the Exec.VI system. Then, I would be able to pass strings back to TestStand to show the user if an error occurred, but I thought I should get the first part of work.
I guess my question is what do I have to wait to see in clusters to the example of the Modules of Code? The Watch window displays all defined variables premise on which has the ContainerOut in the Variables pane, but I don't see any kind of update on facades (VI1.vi and VI2.vi) LabVIEW code. Should I be?
I looked at a few other discussions of the forum here and here, as well as the document of the basis of knowledge here, but could not recreate their solutions. It seems that the connector pane would be a viable way to go, but I'm not sure on how we create and use effectively. According to this document , it makes it seem like it should be simple enough to makes these terminals, but I am still missing a key step. I was able to follow all the steps on the knowledge base document and run the sequence, but then had no idea if it worked or not; I have the report show me the values of the variables I put, but I have no idea whether or not he actually did anything with the LabVIEW VI, or how I could see that.
Please let me know if you need further information or clarifaction everything I ask.
Thank you for your time,
JColvinDigilent, a company of National Instruments
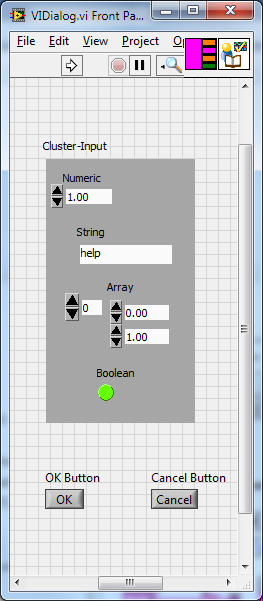
If you want to enter values, you must create a vi for instance dialog box
The OK button will allow new values to pass to the output terminals.
A Cancel button will pass just the original through the output values without alteration. The VI will close when either the OK button or cancel were pressed.
Concerning
Ray
-
Table does not work correctly between LabView and TestStand
I'm doing a TestStand program that reads data from a LabView VI.
If I run the VI in LabView, it works perfectly well and generates a table with 18 points in length, the first 3 are numbers between 0 and 10 and the rest being-1 as I intended. Re-run the VI causes the re - initialize correctly and I get a new table that also meets my specifications.
When I run the VI of TestStand, it works fine once, producing a table with 18 points, the first 3 are numbers between 0 and 10, and the rest is-1.
If I run the VI in TestStand once again it increases the length of array in 18 each time. In so doing, it fails to write the new 3 numbers and just add - 1 in table 18 times. If I restart TestStand will work fine once more, he repeats the error if I re - run the VI. I don't understand why this is happening.
I have re-product the error in a separate VI and the order, and I have attached an example in this post. The VI contains all the necessary information (if not, please say so and I will correct it), and TestStand sequence is configured to put all results, I would find useful in the report (as additional results).
Your problem is your VI. Specifically the comment nodes. They initialize on the first call. TestStand retains the VI in memory. So when the VI is called again, the comments always nodes have their last value. You will get the same results if you have VI your ArrayBuild.vi twice appealed.
The way you use the feedback nodes, they really replace with Shift Registers. I like your comment nodes, but since you pass the value of the node in the loop, the SHIFT registers are much more appropriate. Just make sure you initialize your Shift Registers.
-
How to pass variables between Labview and Teststand
It is probably a trivial question, but I'm new to TestStand. All I'm doing is updated to a variable in Labview and then pass this value in a local variable Teststand. A simple test that VI is attached. I get no error and it seems correct, but when I followed the variable via TS watch display is not updated. Also I am not able to read the variable outside TS. It is probably a trivial thing, I'm doing wrong, but I'm stuck.
Too bad, it was simple. Just need to add the context of sequence as input, then set it to ThisContext TS
-
Communication between LabVIEW and MCU based on Modbus Protocol
Hello
I am a first year student in the port.and series applications see you, my projiect needs to communicate between LV and MCU based on Modbus Protocol.all configure it are correct, but the lv to send false information which is not suitable for modbus.i do not know how to fix it.
My programs are:
Why did you decide to write your own code instead of what is already available? If you had done a search, you would have easily found the modbus library. Just give a try.
-
Switch time delay between 3 and back!
Hello
I'm trying to figure out how can I switch between three cases in a case structure for a while between each switch.
For example: I have three cases in a structure of case (case) {0,1,2} where zero is the default case.
What I want to do is to start in the case of the value by default 0 wait 1 s switch for case 1, wait 1 second switch case 2, wait 1 second back switch for case 1, wait 1 second back to the 0. Then repeat the order.
I used the timer elapsed value of the ramp function Tim from a selection function between true and false, but with the additional case I don't think that this approach works.
Any ideas?
Search for the term "State Machine". That's what you're trying to invent (nice work) so feel free to 'Cheat' and look for the wheel as it exists today.
Ben
-
Problem between Labview and Melanie 2602
Hello world
I think my question is a bit silly, but I really don't know what the problem is. I just want to read my current solar cell by changing the level of my blood to get an IV curve, which is normally pretty easy. So, I created a loop, where I increase my voltage step by step, and used a function named VI from Labview library that connects the Keithley and Labview together, "Keithley 2600 Series.lvlib: Source Level.vi. I start at 0 and increase by 0.01 volt each time. If I use execution of climax, I see clearly the value is correct, and if I go inside the SourceLevel VI, I clearly see the command string: "smub.source.levelv = 1.6," for example, if I want to put my voltage at 1.6V. The attached picture shows a part of my code.
Despite all this, it is clear that the Keithley does not react properly. It only works v of v 1V, 2V, 3V, etc... but never the values between. My IV curves are ok to read the Isc, but no VOCS. Never happened to any of you? I would be really happy to understand what I'm doing wrong, because it seems easy enough to solve. :/
Thank you very much!
It is quite difficult to debug a picture of a tiny part of the code.
But I'll take what I see. Your constant shows a 0.01 (comma). So I guess that you are in a country that uses a comma instead of a decimal point. I don't see what is happening inside the code Keithly, but I'll make an assumption that he made some conversions where it is expected that the comma is a period.
Look closely at the code Keithly and see if that explains it. Try to set your PC to use a period for the decimal point and try to re-run your code and see if it works better. It is possible that Keithly conversion uses a system, rather than setting using a decimal point, which is that your sentence says it's sending.
-
Communication between Labview and Acton spectrometer via USB or RS232
I'm trying to communicate between a PC running XP and a spectrometer to Acton 2300i using Labview. Windows recongizes the specification and assigns it to COM3 with the correct name. Also, the software provided with the specification can communicate with him. However, I was unable to communicate using VISA in Labview. I downloaded the simple read and write example vi fromt the example finder and changed the entries at 9600 baud... but I am still unable to connect. I also tried connecting via software of measurement and automation NOR, but getting the timeout error code. I was able to connect using GPIB of Labview for another more old Acton Spec 500i but the onle new version connects via RS232 or USB.
The problem was simply not having a return of carrage added at the end of my order. Thank you for your help.
-
Communication problem between LabView and acquisition of data USB 6259
I want to monitor a data USB-6259 acquisition using LabVIEW 8.6. However, when you try to create an explicit task (using the DAQ assistant) in order to acquire a signal, I get the message asked supported device found¨. I can see the USB-6259 under ¨Devices and interfaces¨ to the MAX, but when I try to import the configuration data for NOR-DAQmx 8.7.2 in MAX, I get the message ¨Can´t import file configData.nce. File not found¨. I use NEITHER-DAQmx 8.7.2. Any suggestions?
Corneliu
Hi, Corneliu,
This question could be generated due to a corruption of database of MAX. Here is a link to restore the database to the MAX.
http://digital.NI.com/public.nsf/allkb/2C7480E856987FFF862573AE005AB0D9?OpenDocument
Just follow the steps and let me know if that solves the problem.
A greeting.
Jesus.
-
Communication between Labview and Rn42 Bluetooth
Hello
I am currently working on a project that requires communication between a bluetooth equipment and my pc with bluetooth built-in. The bluetooth hardware is verfied working with Blueterm on android. However I'm unable to connect with my laptop blueterm. Is back a unabe to connect error. I use bluetooth vi without series or visa. This method is suggested? Thank you
-
What are the differences between LabVIEW and LabVIEW FPGA and LabVIEW RT
I need a comparison of LabVIEW, LabVIEW FPGA, and LabVIEW RT
Sorry, I misunderstood.
LabVIEW RT (LabVIEW Real-time) combines graphical LabVIEW of programming with the power of a real-time operating system, allowing you to create applications in real time.
-
Delay between master and slave 580 ex IIs
While exploring the flash wireless with my two 580 ex IIs, I noticed when I jumped in the master test, he pulled a delay into the slave. This test has been run while the captain was not mounted on my camera and the sensor of the slave was headed in the direction of the master flash. The captain has been on the position 'on', so I wasn't trying to send a 'read' flash Any suggestions?
If you have tested it by triggering a pop of test on the mask by hand (instead of having the camera trigger it)? Or are you using a wire/trigger any?
If the first case, why not put the master on the device and test it?
-
Communication delay between touch and keyboard
I use a Windows 8 for laptop (ASUS) to control a robot. The robot is controlled by a basic computer CNC program. When I use the touch screen to respond to guests who shows the program, the robot reacts appropriately. When I use the keyboard to meet guests, there is a delay in the response of the robot. What happens in later versions of Windows 7 and Windows 8. This isn't a programming problem since everything worked properly until we started to use computers with touch screens. Anyone has any ideas about all parameters, we can change to make the keyboard respond the same as the touch screen?
Thank you
Mary
I tried the boot, but it does not solve the problem. Our programmer was able to find a workaround for the latest version of the motherboard of robot. Those who have the older motherboard will just have to live with it. Most won't even notice the delay, but we do not always like it. I'll let you know if our programmer numbers on what is causing the delay.
Thanks for trying to help.
Mary Stephens
Maybe you are looking for
-
try to print from my laptop connected wireless
When I test printing from Firefox on my laptop Firefox crashes if I goto Internet explorer, I am able to print what I am doing wrong
-
If my laptop came with Vista installed on it, but it crashed and I currently have installed linux, can I still switch to 7 for $30? original title: moving from Linux to 7
-
computer won't reboot after updates missing or corrupt ntoskrl.exe
I have a HP pavillion laptop - I have upgraded to Vista Business (so I than the cd) the computer failed to install service pack 1 for ever. He kept getting an error which is ambiguous in the research. However, one day last week he decided that it wou
-
What can I updare my player sd sdhc capable drive?
I have a 2005 office who can only read sd cards. How can I upreade it read sd or sdhc cards xc?
-
Get the 80096010 error when you try to run windows updates.
error 80096010 error 80096010 Hi I can't update tried reformatting and now I have the same thing and my windows will not now be, kind of frusterating can anyone help with telling me what this code is