Motor control with time delay
Hello!
If I understand you is good, this might help you. It is created in LV2010
Note that you must put in logic before you run the forloop, since the trip from 0 mm and 0 mm resolution is not a good thing to run.
Tags: NI Software
Similar Questions
-
PID control with big delay in the process variable
Hello
My goal is to control the temperature via a valve and heat exchanger. I proceeded variable (temperature) measured from a hose. This temperature should be raised a few degrees with a heat exchanger. So basically I need to order a valve that allows the water to flow through the heat exchanger to raise the temperature to the desired level.
My original plan was to use a base PID regulation to operate the dispenser. However, it is about 0.5 to 1 minute of delay time in the temperature probe after I opened the valve, which increases the temperature. This leads to a situation where the PID regulation valve fully open during this period (trying to get the temperature rise). Then once the temperature begins to rise it fires quite quickly. PID begins turning the tap off almost immediately, but because of the time delay in the sensor, the temperature exceeds seriously. This led to severe oscillation and at worst unstable processes. I tried to adjust the PID control to "predict" the timer to close the valve in advance to minimize the excess, but failed.
I would appreciate if anyone has any ideas how to make this type of control with Labview PID functions. I also wonder if there is a better type of control procedure for this scenario as a PID control?
-Lars
This is a very common situation in the heating control, and generally PID can be adjusted to make it work. How do you do the tuning? If you do it by trial and errors, you have little chance to succeed. For a slow process with time delay, I like to use the method Cohen Coons, or similar open Ziegler-Nichols-loop method. The idea is that you temporarily remove or disable the PID. Set the valve in a fixed position and wait for the temperature to stabilize. Then, change the setting of the valve and record temperature at regular intervals data until the temperature is stable again to a new value. Use these data to get the initial values of PID using the equations provided by the tuning method you choose.
-
need suggestions on the way to a position on a motor control with current continuous
Hi, I'm a newbie with labview
I'm doing a position on current motor control continuous. I use a USB 6259 to generate an output voltage and acquire the angular position of a coder.
I enclose my system of proaction
How can I transform into a feedback system, with a given reference signal?
Thank you
The "cascade dc motor speed regulator" example uses the Control Design and Simulation Module, and it is thought to control a motor which is simulated. Since you have to acquire data from a real system the standard while loop is correct.
With respect to the operation of PID control, you can take a look at the following examples:
-
Maxon motor control with LabView
Hello everyone, I'm new here and I tried to find out how this process of work for some time and I ran out of options. LabView is very difficult to understand.
I'm about to order a controller epos Maxon motor 24/5. I have a vi that does what I do, but I need to find a way to make the process faster. Basically will control a wing that goes forward and backward at very high speeds. I'm not sure what I should do, I would also like to generalize the process by a power enter a function or a wave of the position of my choice. If any of you all can help me it will be greatly appreciated. Thanks in advance.
CarlosUT,
Without the subVIs Epos, it is difficult to say where downturns could be.
Take into account:
1. the mathscript node is probably much slower than native LabVIEW, special code for what looks like a logic very simple. Replace with the range of comparison functions. Also consider the feedback node initialization so that you know where it starts when the VI is called.
2. learn a few basics of data flow. Your delay (ms) and judgment is read only once at the beginning of the VI and these original values are passed to the loop. Any subsequent changes to these values will not see inside the loop. Move the terminals in the loop.
3. double code: you have the same Subvi in each case in the structure of the case. Move the Subvi outside the structure of the case and simply use the box structure to choose which set of values will be used.
4. given that the minimum value of the delay (ms) is 150, the loop cannot run more than about 6 times per second. You don't specify what you mean by high speeds for the control of the wing, but this may be a factor.
Lynn
-
(I hope) Simple problem with time delay
Hey people,
I am a neophyte of labview and I have a program (see table) on the screen I use to Flash one of the three signs a pressure switch is released. There is a detection device of time between the pressure switch (run through a data acquisition) and the flashing of the sign on the screen; However, when I use a nonzero value for the delay, the acquisition of data appears to trigger after a variable duration after the button is released, and THEN the delay occurs. If I don't use any delay, acquiring data reliable triggers immediately after the switch is released (and therefore the sign flashes immediately as well).
I can't understand why the DAQ does not trigger immediately in all cases, regardless of the value of the elapsed time. The only thing I can think of that could have an impact on is the computer I do turn it through is dated (2 Ghz P4 with 512 MB of RAM), but it's not as if it is a program that is complicated... Please help! Thank you!
The stacked sequence right click and "replace with flat sequence. The flat sequence right click and 'delete the sequence '.
You have a race condition between val Trig and local of it. Wire directly to the loop to make sure that it is this happening val trig that you use and not the previous races.
/Y
-
I am trying to configure a command to my MC load in an order timed. I was looking for how to write function. Help, please!
you're welcome :)
-
I have a problem with time limits in Parental control.
Original title: Parental controls: time/blocks. How it works once defined?
I just put a few times on our computer that I DON'T want my child to be on the computer. If my child is connected when the window of blocked time arrives, what happens? It hits them? Only apply it is able to connect at this time? Will get a warning that they're about to be disconnected?
Hi trossk,
You can set time limits to control when children are allowed to log on to the computer. Time limits prevent children to connect during the specified hours. You can set the hours of different logon for each day of the week. If they are connected end their time, they will be automatically disconnected. For more information, see control when children can use the computer.
Reference:
What can I control with Parental controls?
http://Windows.Microsoft.com/en-us/Windows7/what-can-i-control-with-parental-controls
Choose which games children can play
http://Windows.Microsoft.com/en-us/Windows7/choose-which-games-children-can-play
Video: Use Parental controlshttp://Windows.Microsoft.com/en-us/Windows7/help/videos/using-parental-controls
Hope this information helps. Get back to us if you have more queries about Windows.
-
MacBook Air (13 inches, beginning 2014) 1.4 GHz intel core i5 4 GB 1600 MHz DDR3Intel HD Graphics 5000 1536 MB
Downloaded constant guard by Xfinity Norton. All scanned and no virus found. Files, quick scan, system, absolutely nothing. This is the question that I had. My Mac would freeze upwards on the websites with a delay when you try to scroll to the bottom of the page. Go looking for something and it would be a delay in typing. I was let her rest ok and stopping. Well not every night. I was not closing things by like mail or safari or finder. Could be the problem? I mean that there are no viruses! Should I do turn to norton or keep? Thanks for the information and I hope this can be a quick fix.
First, never use any type of software "anti-virus" or "anti-malware" on a Mac. That's how cause you problems, not how you solve them.
When you find the problem, note the exact time: hour, minute, second.
These must be run as administrator. If you have only one user account, you are the administrator.
Run the Console application in one of the following ways:
☞ Enter the first letters of his name in a Spotlight search. Select from the results (it should be at the top).
☞ In the Finder, select go utilities ▹ of menu bar or press the combination of keys shift-command-U. The application is in the folder that opens.
☞ Open LaunchPad and start typing the name.
The title of the Console window should be all Messages. If it isn't, select
SYSTEM LOG QUERIES ▹ all Messages
in the list of logs on the left. If you don't see this list, select
List of newspapers seen ▹ display
in the menu at the top of the screen bar.
Each message in the journal begins with the date and time when it was entered. Highlight date back to the time you noted above.
Select the messages entered since then until the end of the episode, or until they begin to repeat, whichever comes first.
Copy messages to the Clipboard by pressing Control-C key combination. Paste into a reply to this message by pressing command + V.
The journal contains a large amount of information, almost all this is useless to solve any particular problem. When you post a journal excerpt, be selective. A few dozen lines are almost always more than enough.
Please don't dump blindly thousands of lines in the journal in this discussion.
Please do not post screenshots of log messages - text poster.
Some private information, such as your name, may appear in the log. Anonymize before posting.
When you post the journal excerpt, an error message may appear on the web page: "you include content in your post that is not allowed", or "the message contains invalid characters." It's a bug in the forum software. Thanks for posting the text on Pastebin, then post here a link to the page you created.
If you have an account on Pastebin, please do not select private in exposure menu to paste on the page, because no one else that you will be able to see it.
-
Control the time times of high and low of trains of pulses in C++
Dear team of support of National Instruments,
Here's what I have so far:
I was able to generate the number of pulses (a pulse = a rising edge and front descending one) that the user has indicated via the GUI I created in Visual C++ 2008.
I use DAQmx 8.6.
I use the DigitalSingleChanWriter (hopefully, that's what it's called).
I use for the synchronization of the sample, on request. I tried to use all other types of calendar but I always get a DAQException run the error that says I can use only OnDemand calendar.
OK, so here's the problem:
I have a USB-6008-6009 card connected to an oscilloscope. I know that the connection is correct, otherwise nothing would appear. However, if I send say... 6 impulses, the delay between the first rising edge and the first falling edge is dramatically different and then the second and the third. If I return my samples, I get an assortment of new and totally random times. So finally, my question is "Is there a way to control the time of a great time and a bit of time?"
I use a Compaq 2003 lap top, what is worthy of the rubbish heap. I'm not to blame on this right away as problems that will not solve the problem at hand. Although I understand if it's actually the problem for random times, but I would still have no way to control the time themselves.
I hope that I don't have drug it too long, but I decided that distribute information on would be better then just a few tid bits.
Thank you for support, that you can offer,
Daniel
OK, so I just returned from the lab, and this is what I got:
I was able to control the time at the time of the high and low by using the "WriteSingleSamplePort" of the DigitalSingleChanWriter method.
I put it in a loop that repeated many times that the user wanted impulses.
At the beginning of the loop, I used a delay function that I wrote and delayed for a time given and then a pulse with a value of 255 and then delayed again and a pulse with a value of 0. And then restarted the loop.
In the end, it works.
Of course, I have another question. I kept reducing the amount of time between two pulses (1 s, .5s, .2us and so on). However, once I have diminished the time of secondes.01 or a millisecond, the pulses on the arrested oscilliscope becomes smaller. It seems that past 1 millisecond Board USB-6008/6009 is unable to deal with the exigencies of the moment. Or else the computer trash part on that I cannot deal with the exigencies of the moment. But I believe that the Council is not at fault because it was designed for this exact sort of thing, could you tell me if there is no limitation to the Commission which prevent production of pulses in or within a period of 1 millisecond. Thank you very much.
Thanks for all the help,
Daniel
P.S. I'll stop you buggin with big messages that I promise you.
P.P.S. If someone wants to see my source code for their own project, I'd be more than willing to share. Please email me or leave a message here.
-
Help me build a stepper motor control in LV?
I need control a single linear axis slide that is driven by a motor nema 34. It will be very simple move, start, move at a constant speed, stop, return. I do not have the engine. I can use a controller and a software company that sells me the slide, but prefer to use Labview.
I currently have a PXI chassis with a 6713 or 6704 available, or a '2 M Gate FPGA and cRIO-9073' with a NI 9401 I'll take delivery of every day now. I don't know much about the system in real time, but I have to learn it soon in any case.
Can I use my existing hardware/software to create a stepper motor control, or at least can I use Labview to interface with a motor drive step by step if this is not possible. I am currently looking at a 34T 1 Vexta engine, but do not know much about the stepper motors and do not really want.
Edit: Should have mention that I LV 8.6, with no motion software.
Engines step by step to have two power circuits creating magnetic fields perpendicular to each other inside the engine (in mathematics a certain sense anyway) you can consider working like pistons on a crankshaft which are out of step 90 degrees. You can use LV to manipulate these two. Want to make their vector sum in different directions while moving. Imagine making a point on a chart around the origin orbit. You need to consider things like the speed at which you can start the dot in orbit. Engines step by step can't go very fast if you add the requirement that the application start and stop without having to build your own ramp.
But it would be a big enough work for all, but more simple movements. You will need to learn less about stepper motors if you buy a motor controller that supports ASCII strings on a line of serial port as its instructions. I did recently with good results. LV must compose strings and write to the serial port of the PC. Having the engine go to a post 2205 units requires composing a string like this:
d 2205
go
It works fine without another component or software purchases.
I did something a little more complicated and wish now I had started with a decision to use the material in motion control of OR, or at least look at more the issue. When things are more complicated, using a serial port as the bridge between the PC and whatever the microcontroller is located in the drive motor starts to introduce limits you can schedule around with a lot more trouble.
You have many options depending on your purpose what is and how much trouble, you have to take.
-
problems with the implementation of MPC with system delays
Hello
I have Aproblem to implement a MPC controller for a system with significant delays. The final control system will be used with a RT PXI on an engine test bench, but for now, I'm running a few previous simulations to solve problems.
The attached vi shows a simplified system for MIMO 2 x 2. When I run it with the default settings (initial window = 0; = 5 prediction horizon and horizon of control = 2; no delay of system, or delay of prediction model) everything works fine.
However, if I understand a delay of the plant (time factory example = 10) the CPC shows a behaviour that is not clear to me:
* If I put 'integral action?' false: MPC operates in open loop, and the MPC calculates (and apply) the same control in the system not delayed action. Of course, it cannot compensate for errors in modeling, is not really for me.
* If I put 'integral action?' to true: System is not stable. for fixing it, I change the initial window at 10 (and therefore the forecast at 15 horizon). Although the system is now stable, the performance of the control is not really good, because significant overruns exist
Then I try to include in my prediction model of the delay (through a block 'CD Set delays to the (State-Space) model'), but it seems that the PPC is not sensitive about the time defined in the model.
Hepatitis could me?
Thank you very much in advance,
Carlos (Adama)
(Note, in the attached example, in what I scored blue settings that I'm changing)
Don't worry, I solved the problem myself including delays in the model defining additional States that aceted as souvenirs.
I can confirm that the CPC does not takes into account the deadlines defined in the model of the SS.
-
Have no control with the mouse on my Satallite P300-123
I have a problem with my mouse on the laptop. When I use the mouse, the mouse is every time left right up down.
So I have no good control with the mouse.Can someone help me with this probem?
(Sorry for my English)
Hello
Do you use the touch pad or external mouse?
If you use an external mouse disable touchpad by using the FN + F9 key combination, especially when you use the keyboard. -
Hello
I have a cRIO-9014 with a NI9505 DC brushed servo drive module and I would like to program the FPGA to PWM and encoder, quadrature, interfacing using the functions of intellectual property intellectual property mentioned in "CompactRIO Motor Control Basics Tutorial":
DX of encoder quadrature method (FPGA, using SCTL) .vi
Pulse Width Modulation (FPGA, using SCTL) .vi
I did a search at ni.com/ipnet but I could not find them.
Where can I find free downloadable IP cores for the blocks of PWM and encoder to include them in my interface FPGA program?
Thanking you in advance,
Manual
Found by myself (google search!) to:
https://lumen.NI.com/nicif/us/codepowelecguide/content.XHTML
-
Update of digital control with different values with array function
Hello
I have attached my code base. I want to execute the code for 2 sets of digital control with a gap between the two values, then pass it. Something like that
ABC
Initialize the P1 = 10; P2 = 20; P3 = 30; P4 = 40
Run the code
delay = 10ms
Update of P1 = 150; P2 = 200; P3 = 350; P4 = 500
Run the code
jump to abc
I am stuck how can I update the values of P1, P2, P3, P4? I thought about using a function table but couldn't go further.
Thanks for the help,
Ana
Hello Ana,
One way you might achieve what you are looking for is using property nodes. These property nodes will allow you to change the values of the block diagram control. You can set up a structure of case inside your loop that will change control through nodes of property value after a certain number of iterations. Here is a community sample that shows how to use the nodes property to change the Boolean controls:
https://decibel.NI.com/content/docs/doc-22669
-Erik S
-
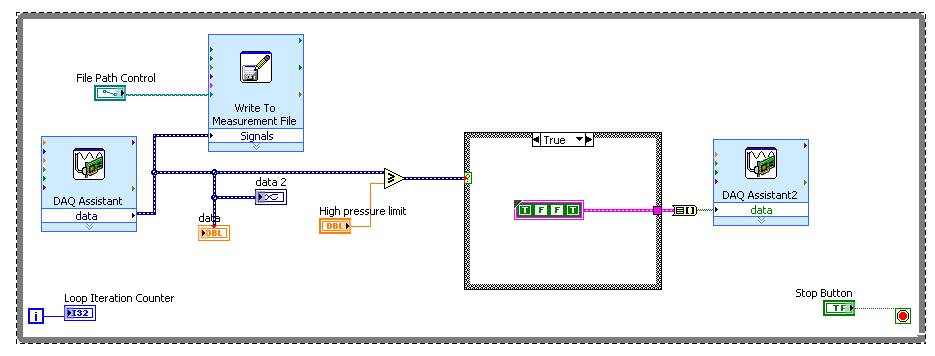
Hello all, first post here,
What I have is a VI that measures pressure continuously from a cDAQ 9237 and folders in a file. What I need is to do is to react on this feedback to open/close data 4 solenoids both needed a cDAQ 9481 for this project, I need to fill a ship on a cyclical basis to + 2 then cycles-2 lb/po2 for 100 k. So far, I have solved this problem for a two State or limit level system as indicated below.
I think I need to expand this concept to the State of a multiple system a 'fill', 'Empty', 'Hold' (and probably a State initialization and purpose as well) who is selected by the feedback data. I think if I do all this with logic and limits, I can't always custom if its time to fill or empty the tank, so a kind of sequencing is required. At some point, I'll add a counter on one side of the cycle for counting up to 100 k bar and complete the test.
You have any suggestions on how to achieve this? I'm puzzled.
Thank you
Ken
"I hope I can count every instance of wedge of high pressure. I think it may have something to do with local variables, but not him have not yet solved. ' Add a record to offset which is incremented in this State. (A node of feedback would be more clean!)
I'm also fighting how to implement a short break after that occur in wait States; Look for the vi time delay on the pallet of timekeeping
Maybe you are looking for
-
Graphical glitch in background task manager?
A small thin line made their appearance in the Manager of tasks over the past month and becomes stronger and more evident of the day. In the beginning, it was fair points. This mean?
-
I doubt there will be what this forum can do, but I want to have it there because it seems to be an internal matter of the HP part. I have a laptop with Win 7 Pro x 64. The drive died, and I used the recovery disks that I paid to reinstall the operat
-
All-in-one printer 926 Dell with Windows 8
Someone at - he found a way to use this printer with upgrade of windows 8? The driver is not compatible and I can't find one that works.
-
Need permission admin using the admin account
I was doing annoyed recently how my computer asked "permission to the administrator. I have an Admin account and a guest account, but I use only the Admin account. However, whenever I do anything it requires permission. This includes the removal of f
-
Hello is it possible to add pictures with LabelField using GridFieldManager Horizontal. If someone knows how to do it, please send me the link or sample example. Like this... 1st rank---> image1 Image2 icon icon LabelField LabelField Row2---> Image3,