An encoder quadrature of a single tree NEMA23 engine mounting (both of OR)
If I have an engine of NEMA 23 (exhibit no. T22NRLG-Paramus-NS-00) and an encoder quadrature (part number 15T-01SA-1000-N5RHV-F00-CE) is it possible to connect the two? I ask b/c the design of the engine is not clear, but it seems that I would need an engine DOUBLE shaft to mount the encoder and because the simple tree engine has no mounting hole on his face. Please help me if you can, thanks
Hi cforem5,
Unfortunately, you will very probably make the engine double shaft to attach the encoder. This is indicated in the record of stepper motor and encoder specifications .
In theory, you could mount the encoder to the single tree motor shaft, but he wouldn't leave enough room to connect to what anyone else in the tree. If possible, it would be better track down an engine double shaft.
I hope the information is useful!
Tags: NI Hardware
Similar Questions
-
Can I install my single purchase of photoshop on both computers video editor?
Can I install my single purchase of photoshop on both computers video editor?
Hi michaelm,
Yes, you can install Photoshop program on two machines.
-
Is it possible to limit the output of a multi-turn encoder to match a single round?
I use a Heidenhain encoder with an EIB Heidenhain 741. The 741 takes EnDat signals and converts them. I use a program called LabView of Heidenhain poll Positions. The encoder outputs are incremental and absolute. The outputs take into account after a revolution and I would go back to 0. The program uses a table 1 d with quad 64-bit for the absolute value and an array of 1 d of 16-bit value for the incremental values. I'm trying to convert them into degrees. I have done this except when it reaches 360 that the count is not 0. Is there a way to count position back to 0 when the number of bits is done? Or y at - it a way to make the degrees back to 0? The degrees was taken out by taking the (Position/((2^26)/360)) which is Position/186413.51.
This is my first large LabView project I hope this is enough information.
Use the function Quotient & rest on the digital palette. Divide by 360. The output remains will always be in the range 0-359.
Lynn
-
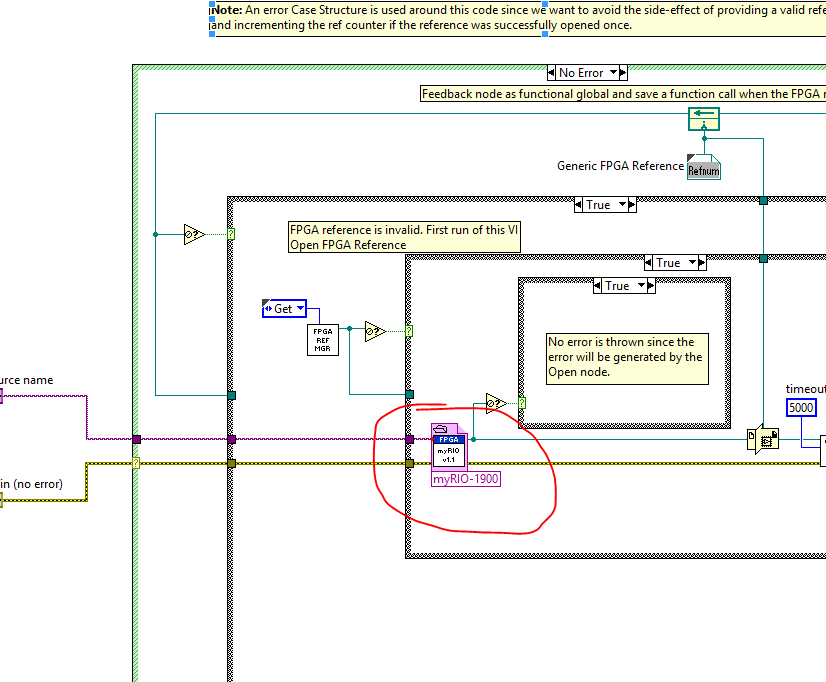
VI quadrature encoder does not work after programming of FPGA
I'm rather new on the MyRIO, and I work on the motor of the MyRIO and read control in a quadrature encoder at the same time. Programmed individually, the two pieces of work at Marvel, but once I have combine them and try programming, control of motors not to not work signals, but the reader encoder does not work. I use the Express VI for the LabVIEW quadrature encoder reader, and I produce four stepper motors signals using FPGA.
It seems as if the encoder is disabled when I program the FPGA with my code, because if I have two parallel loops, one for the reader encoder and the control of step motors, if I stop the loop of step motors, the encoder works immediately.
Is there something simple that I'm missing? Any suggestions would be greatly appreciated!
Thank you
Enan
I realize now that my last answer could have been confused and not useful to someone else who may come across the same problems later.
Here is how I solved the problem I've had:
I had to derive Boolean expressions for an encoder quadrature (essentially to create my own) and then used the outputs (UP, DOWN) to increment/decrement a counter using the conditional statements. Then, I stored the value of direction in a flip flop implemented using two conditional statements of T/F in series and connected to a shift on the edge of the loop register.
It was all able to be implemented in a single cycle timed Loop, and then I managed to place in the same loop that I used to control stepper motor.
In this way, I could have a VI collected in a Bitfile and could be programmed to the FPGA.
Hope this is clearer!
Enan
-
Using more 4 for MyRIO quadrature encoder inputs
Hello
I am doing a project where I need to drive 6 motors, each with feedback from encoder quadrature to control the position.
Currently, I use the VI MyRIO encoder, but there is a limit to 4 encoders. What is the best way to read 6 encoders simultaneously with the MyRIO?
Thank you
Timothy
If you must change the FPGA myRIO personality you have a few options.
The best option is to start with the FPGA myRIO sample project, add and delete components according to the needs and then build your bitfile. No registry (LV FPGA control / indicators) you do not change will still work with the Advanced IO screws and screw Express. To use the new bitfile (FPGA personality) you must update the Reference of VI FPGA opened in myRIO Open.vi v1.1 (LabVIEW 2013\vi.lib\myRIO\Common\Instrument Driver Framework\myRIO v1.0\myRIO v1.1 Open.vi).
After having done all this time, you use an Express VI myRIO or Advanced IO VI it will use your custom bitfile. All peripheral channels that you left in place will continue to work. You have deleted all channels will always appear in the screws, but will not work (they will probably throw errors when running) and all new channels that you added appear in the screw . New channels, you will need to use FPGA read / write nodes for read and write configuration data and register you created in the FPGA personality. These changes will persist on this computer until you change the Reference of VI open FPGA to the bitfile original.
Let us know if you have any questions about all of this.
Thank you!
-Sam K
Join us / follow theGroup of pirates of LabVIEW on google +
-
Hello
I have a cRIO-9014 with a NI9505 DC brushed servo drive module and I would like to program the FPGA to PWM and encoder, quadrature, interfacing using the functions of intellectual property intellectual property mentioned in "CompactRIO Motor Control Basics Tutorial":
DX of encoder quadrature method (FPGA, using SCTL) .vi
Pulse Width Modulation (FPGA, using SCTL) .vi
I did a search at ni.com/ipnet but I could not find them.
Where can I find free downloadable IP cores for the blocks of PWM and encoder to include them in my interface FPGA program?
Thanking you in advance,
Manual
Found by myself (google search!) to:
https://lumen.NI.com/nicif/us/codepowelecguide/content.XHTML
-
Measurement of angular position with encoder in quadrature and NI USB 6281
Hello.I have an application developed with labVIEW 7.1 and 6014 OR for the measurement of angular position using encoder quadrature, where are used 3 sons - one of them connected to the source, second to the OID (0 or 1) and a third to digital ground. I can't use the same application or NI USB 6281.Now connections, I would like to know how I can create a similar application in labview 2009 and how to make the relevant connections for NI USB-6281, which is a mx NI DAQ device. Please suggest. Thank you.
I have my loan application. I understand there are big difference using LabVIEW 2009 and NI USB card, compared to the previous version I was using THE LabVIEW 7.1 and a traditional daq. The difference, I should say that wellness is both in terms of simplification of code and the accuracy of the result. I was a little surprised, showing results. Thanks a lot to JB for your time and sharing those pieces of details.
I can well after awhile my code in the forum. Hope this helps someone like me looking for a similar application.
-
How constantly sample meter signal for quadrature linear encoder
Hi all
Trying to permanently change value of Schneeberger linear encoder quadrature at certain frequency as 10 Hz of the sample and the output to the text file. Everything I choose in the external clock that I can't run the DAQ assistant. No one knows how to fix? I don't know what kind of clock can be used.
I have read a few replies that ppl would connect to an another sample clock in parallel with the meter channel. But I don't know what is the principle of operation of this method.
I spent already as 10hours on it. Could someone tell me that some information?
Looking forwad to your help! Thank you very much!
Best regards
George
Hi George,.
You'll want to use the DAQmx API rather than the DAQ Assistant.
The task of the encoder itself would look like this. You need not use the trigger options.
The problem is that you will need to generate a clock from another source that the card is unable to generate examples of clock counter directly. The simplest is probably to use the second counter. Here is an example showing how to use a meter to output as a sample clock (although the example shows the analog inputs, simply replace the task of analog input with the task of the encoder shown in the previous example, I linked).
So, you would use a counter (say ctr0) for the task of the encoder, and then the other (ctr1) meter for the generation of sample clock. You must specify your task of encoder using the InternalOutput of ctr1 as the sample clock (if the internal counter output appear in the drop-down menu, click with the right button on the terminal and select the e/s name filtering > include Advanced terminals). Start the encoder task before the output task (although given that both are running continuous it doesn't really matter that much).
In addition, 10 Hz is not too fast. If the exact date is not as important and the above seems a little overwhelming, it might be easier for you to just run a loop of 100ms clocked by the software from example like this. Note that the exact time loop pourrait will vary from cycle to cycle, so this method is not very good if you use sampled data to perform calculations of rates.
Best regards
-
How to find the velocity of an incremental encoder
I use the RE22I encoder which can give up to 8192 pulses per revolution, I have A, B, Z reports that I use an fpga as a controller Please help me.
How to find the speed of the encoder using these signals I'm going to have a clock in the fpga sysytem will help.
Start by looking at the information on Wikipedia on the rotary encoders and a book on encoders OR white. These articles will give you a basic understanding of the encoder and the signals it produces.
With proper decoding, you can get the direction and momentum of each of the points on your encoder 8192. If the tree can reverse (same vibration on one point unique all-in-mnearly stationary), full decoding must be used. If data are only of interest while the tree turns in a direction and speed will not close to zero, a simple decoding can be used. Decoding of a quadrature encoder is a good way to learn to use a state machine. Signals A and B can exist in only four possible combinations, but the possible transitions to do interesting things.
Define DECODING is a purely logical exercise and it is a simple coding in LabVIEW, such as a state machine. There are examples, Desing Patterns, or project templates (depending on your version of LV) that come with LV to help you get started.
By using the channels A and B you can update your calculation of velocity 8192 times per turn. With the help of Z you get only an update by the revolution. You use depends on your application. The pulse of Z is also useful to define a reference position for the measurement of phase angle.
Lynn
-
cRIO - H bridge using the PWM output and input only encoder control
Hello
I am currently working on a project to control a 230V brushed servo motor using cRIO. The engine drives a linear step and the final project needs to create a control of position of the engine that the user is able to enter a speed, position and control steps to move to this position.
I use a bridge using NOR-9401 and H to power the motor circuit and a PWM output to move the engine. I also have an encoder, quadrature, connected to a NOR-9403 read position and speed. I use the example program of encoder for the NI 9505 - in my application.
There is no voltage or current on the drive circuit sensors so I wouldn't be able to have a closed loop current in this case. The scene release mechanism is such that the position is locked if the motor does not move and I do not need a torque control to keep the engine in place.
To achieve this, I just wouldn't be able to use a single PID VI (probably the FPGA VI express for discrete PID)?
I am not very well versed in the theory of control, and therefore no indication in the common sense would help me a lot.
Thank you very much!

Sexy,.
in general, it is best to use a cascade control loop structure but in principle must also be able to use the output of the control loop of position as an input to the PWM generator. The main disadvantage of this configuration is the current limitation missing. Without current meaning is no longer the only way to protect your engine from drawing too much current to limit to the current maximum output of your diet, or to limit the maximum duty cycle of PWM. Without current information, the last method is quite inaccurate, but better than nothing.
I agree with Mike, you should look in the examples of the 9505 module and use the controller position vi of these examples. This PID controller is optimized for motion control applications and it is implemented in the fixed point arithmetic, offering the best performance on and FPGA.
Kind regards
Jochen Klier
National Instruments
-
Good option for quadrature decoding at least 10 channels simultaneously?
Hi all
I use several modules encoder quadrature Avago AEDR-8500 and am interested in encoding of 10 to 20 of them both for an assortment of EHR. I need the absolute position data so their multiplexing in the channel of a decoder won't work, and they need to taste at least at 100 kHz. Hardware platforms, I welcome are Renault USB or modules for a chassis 8 locations cRIO than i've got. That's all. 20 minutes of research has not revealed any dedicated quadrature decoding hardware modules, so I wonder what could be my best hardware solution.
What about this: http://sine.ni.com/nips/cds/view/p/lang/en/nid/213047
-
Capture high speed encoder data
Hello
I have a motion control project where I would record the position data. High speed capture is limited with sampling frequency of 2 kHz. But I have to save a lot more than higher speed.
I read that there is another option that connects to the motion control card (I use a card PCI-7358) and the map of data acquisition using a RTSI cable and channels A and B of the routing of the data acquisition card encoder using the RTSI lines.
I have 6143 and 6280, 7358 PCI DAQ cards and a RTSI cable.
Q1. Which card is better to use? 6143 or 6280?
Q2. When I look at the examples, I have seen that its possible to phase has the traffic and signals of the phase B of an encoder for the RTSI line with Signal Select.vi. But I couldn't find an example on how to read of DAQ card.
Q3. How can I contact the encoder position phase has and band B pulses which is acquired from the DAQ cards?
Concerning
Hi serkanb,
The 6143 has no support for measures of encoder quadrature (although you can run a task of count of edge and use the B signal as a line up/down to get a similar effect). If you are interested, we'll find more information here (the 6143 uses the same SC I ASIC that make the E Series DAQ devices).
It doesn't really matter too much since you have a 6280 that supports quadrature encoder measures (he uses the STC II ASIC). To answer your direct questions:
Q1. The 6280 is better (see above)
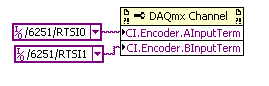
Q2. You need to use a channel DAQmx property node to choose what terminals to use for your task of encoder:
Q3. I would like to start with an example of the expedition:
Help > find examples... > input and output material > DAQmx > counter measures > Position > measurement Position.vi
You insert the property node before starting the task (but after the channel is created).
I hope this helps, if you have any questions do not hesitate to post back!
Best regards
-
Hierarchy tree Denorm full config
What do we need to turn it on in order to see the specifications of trade that the Formulation of exit are related to, in the run-up to the release of formulation?
When display us the FO tree, we see the spec of formulation and master card, but not the spec of trade to which it is bound. We have tried the config setting but without and success. Thank you
David
You are referencing denorm hierarchy, this service captures all hierarchies so that the data must be in the table.
However, I assume you mean the tool navigator of the hierarchy since you mention a view of the actual production of formula. Hierarchy browser shows that the specifications of the user to the bottom of the hierarchy. Going up the hierarchy is non-deterministic as a single tree, for example, you can use the same formula in several finished products. Where used report will show you the data that you want. It will show you both multiple hierarchies. This report and others who profit from the denorm service will be available shortly after the holiday season.
I hope this helps. Let me know if you have any questions.
Kelly
-
How to remove the feature clickable af:tree text node
Hello
I want to remove clickable feature of the text box for the af:tree node. (always expandable with + icon).
even if I use af:outputtext for the node, it is still clickable.
single tree leaf shoud be clickable.
can I do this?
< af:tree id = value = "#{'sTree' MenuGenerator.treeModel} '"
var = 'node' styleClass = 'stree '.
rowDisclosureListener = "#{MenuGenerator.treeToggle} '"
Binding = "#{MenuGenerator.richTree} '"
rowSelection 'single' = >
< f: facet name = "nodeStamp" >
< af:group >
"< af:image source="/resource/images/page.png ".
visible = "#{node.action! = null}" / >
< af:commandLink text = "#{node.name} '"
action = "#{STARS21TaskFlow.goToAction} '"
visible = "#{non-empty node.action}.
partialSubmit = 'true' immediate = "true" >
< f: param = name "module" value = "#{node.module}" > < / f: param >
< f: param = name 'action' value = "#{node.action}" > < / f: param >
< / af:commandLink >
< af:outputText value = "#{node.name} '"
rendering = "#{empty node.action}.
inlineStyle = "text-decoration: none;" background-color: transparent; ">
< / af:outputText >
< / af:group >
< / f: facet >
< / af:tree >
With respect,
WP
Published by: Watel on January 22, 2010 17:31Hello
How about you, using a disabled instead of an output text input text?
Something like
Arun-
-
A motor with encoder closed loop. Can I connect an other encoder without using an engine?
Thanks to LabVIEW with a PCI-7332 and an UMI7774 interface to control a stepper motor with encoder feedback. System is configured in closed loop for the control mode. You will need to add a different encoder to the system without attaching a motor. I'm validation of encoders to each other. Is this possible? Should what kind of latency I expect? I have attached a simple vi. Need to buy one before the answer.
Thank you
You can just plug the second encoder to the second slot without an engine it. Then you can use reading encoder Position.flx to read its position or do whatever you want with it. What about latency times, how are you trying to go under?
Maybe you are looking for
-
Photos.app: Are the functions 'culture' and 'rotation' jpg lossless?
For jpg files, there are ways without loss to change. https://en.Wikipedia.org/wiki/JPEG#Lossless_editing For example rotations and cultures. My question:Are the functions for jpg lossless ' rotation' and 'culture'? Thanks for your help.
-
Firefox about: addons will not load
I have the latest Firefox, but my point: addons page does not load. When I surfed on this page, all I get is a dialogue without end 'loading '. Pushing tabs (get/appearance/plugins) do absolutely nothing, but continue the problem without end of "load
-
How to enable option genius in iTunes Store. I use MAC
-
Camileo S10 - PX1505 where to find service manuals
-Does anyone know where I can find the service manual for the Camileo series?For example the service manual for Camileo S10 - PX1505 - PX1513?
-
No, not the three blind those but my wireless mouse. The two worked yesterday, today or we work. According to my computer, one is one Alps, the other a HD. According to the logo on the mouse, they are the two Logitech, both with new mattresses, and Y