OBD II enhanced PIDs with a/d converters
The ADCS takes by recovering the extended PIDs or improved through service $22, as specified in J2190? Or supports only services $01 - $10 as specified in J1979?
Manual linking Hoovah watch it takes in charge ReadDataByIdentifier, which is $ 22. These services are usually referred to as UDS (ISO 14229), but there is a lot of overlap between all the different specifications.
Tags: NI Products
Similar Questions
-
Topology line EtherCAT with fiber/fiber converters
Hello
I have a request where I will order several NI 9144 slave chassis in a line of a master cRIO topology. The chassis must be 10kV + isolation from each other and the captain so I'll use converters of fiber on the link ethernet between each frame. The lengths of links are relatively short)<>
Fiber converters does meet a particular specification, and if so do you have any recommendations?
I'd better be using using standard Ethernet with NI 9149? I can cope without the deterministic calendar.
Thank you
Richard.
Hi Richard,
The EtherCAT protocol normally works on 100BASE-TX and can also run on 100BASE-FX (Sources here and here). I'm guessing that you have seen the KB that explains that you need for different cheating / hubs for EtherCAT and makes you wonder if the optical converters fall into this same category?
The need for special switches / hubs is because EtherCAT junctions stars work differently that normal Ethernet as the packages hubs need a particular routing. However, optical converters online and do not affect the sense go packages. They are just bit conversion of the tensions light pulses. The main thing to consider would be how much latency converters to introduce network - as this will eventually affect your EtherCAT minimum cycle time.
That said, NEITHER does not test the optical converters, but I've heard customers who use optical converters before (link sorry, not turned to the audience of reference available). As I mentioned above, the EtherCAT protocol specify how 100BASE-TX and 100BASE-FX, so I'll make sure the converter is in conformity with these standards.
-
Problem with 'The Witcher Enhanced Addition' with Windows 7
I recently bought a copy of the witcher. I was able to install it on my computer (windows 7), but when I tried to start the game, it appeared a warning box that says that the minimum requirements were not met. It's hard to believe because it works on my brothers computer, and mine is better than hers in every sense. The only difference is that there is a windows XP. Any help will be appreciated.
Thank you
pman216
Hi PMAN216,
Is your Windows 7 edition 32-bit or 64-bit?
Looks like "The Witcher Enhanced' is not compatible with the 64 bit version of Windows 7." For more information, see the link below.
Kind regards
SAP U G - Microsoft Support
-
Satellite C75-A-13 q - no boot with new HARD drive
Hello world
I have a strange problem...
The crash of hard disk internal down. I mounted the hard drive on other PCs, no access, not detected in the bios... RIP.
It is the starting point of my problem.
So, I decide to replace the hard drive. a new is detected by the bios, everything beautiful, but...
I couldn't start on USB, CD/DVD or hdd internal I prepared before (installation of linux don't care to change the host pc).
Of course, I disabled the BIOS Secure Boot option.So my question is: is there a relationship between the original hard drive and the start feature? How to solve this?
Thanks in advance!
Hello
As much as I know there is no any type of relationship between original HARD disk and the start feature.
You can exchange the HARD drive or enhance it with SSD but so long BIOS recognized new peripheral, you should be able to install the new OS.I upgraded the machine y with SSD and installed original picture of recovery without any problem.
What model of laptop do you have?
Have you tried to install the original recovery image using recovery media created? -
I use the full version of DASYLab 8.0, how to add PID module in the design of the façade (window layout)? while I can vary the p, i, d values in the window layout
To do that you will need to change the varibles PID values and then use the sliders to add numbers to a latch for variables that point.
This is how I think it works in Version 8.
In all cases, you should move on to 12 more stable summer.
In addition, unless that is a very slow process, I generally do not like closed loop PID with DASYLab due to the fact that computers is not reliable with timing.
-
I can't understand how to install controls PID with Labview 2009.
What part of the list of the products installation run to get these screws
We have the full license of the site which is available to academic institutions, we should have it I think.
The only computer I can find the screws on is an older computer that run labview 8.6 and vista.
Yes, thank you.
The problem I had turned that PID controls were on a different CD.
We get a set of CDs for the licnese site, and this particular Toolkit has proved to be a red CD called "embedded control."
Most of the toolboxes is on the 2 first major CDs with the basic software.
-
Synchronization of multiple FPGA PID loops
Hello
I am the design of a PID controller for each of the three axes (X, Y and Z) of a piezoelectric stage using the FPGA module and a cRIO. I used the example of project "Using Discrete PID - cRIO.lvproj" (labview\examples\control\pid\fpga.llb\CompactRIO) as a starting point and I've basically added two PID loops more on the FPGA VIs to the other two axes. I can get the controller to work for an axis at the same time (in simulation mode), but whenever I try to run all three controllers simultaneously, only one works. In order to synchronize between the host and the FPGA VIs, I used three interruptions for each PID loops, but it seems that a single interruption works when I run the code... No idea how to synchronize the three loops of PID with the host VI?
Kind regards
Shin
I think that it is an expected behavior, by the documentation: "VI the interruption is a shared resource, so multiple uses of it induce a further delay and jitter due to arbitration." If you are waiting for the interruption to see, then the other loops cannot continue because interruption VI does not work. On the FPGA if you want all the PIDs to operate at the same speed of loop, put them all in the same loop and use only a single interruption. Or use another synchronization mechanism (set to a boolean of the host, wait it is defined and then erase it on the FPGA). The interruption is only for purposes of simulation, in any case, since the 'central' is running on the host computer. In a real system, the plant works continuously and FPGA directly reads the sensors and outputs, the readers so the only value provided by the host is the set point and is not required for synchronization.
-
How to connect Labview to PLC Modicon Quantum (140 CPU 311 10) with Modbus
I was wondering if someone could give some tips on how to connect Labview to Modicon Quantum plc (the card is 140 CPU 10 311). I am eager to serve a Labview HMI to control the controller that is used to implement the control PID with a VFD. Currently I can communicate via Modbus to the API for programming using UnityPro XL, but I have no idea how to connect Labview. I read the article on place OR "connect Labview to any PLC via Modbus", but I don't know yet. Any help will be greatly appreciated.
Hey Greener.
Communicate with the PLC via Modbus usually requires the Datalogging and Supervisory Control (DSC) Module to have this feature available in LabVIEW. The white paper which indicated you using this module, which may explain why you can't get the communication at work. If this is something you don't have, and purchasing a license is not an option, then you might be able to use Modbus unofficial libraries to get the functionality you need. I have included a link below to a Modbus for LabVIEW library that you can try.
DSC module:
http://sine.NI.com/NIPs/CDs/view/p/lang/en/NID/209851
Modbus Library:
http://www.NI.com/example/29756/en/
Kind regards
Ryan
-
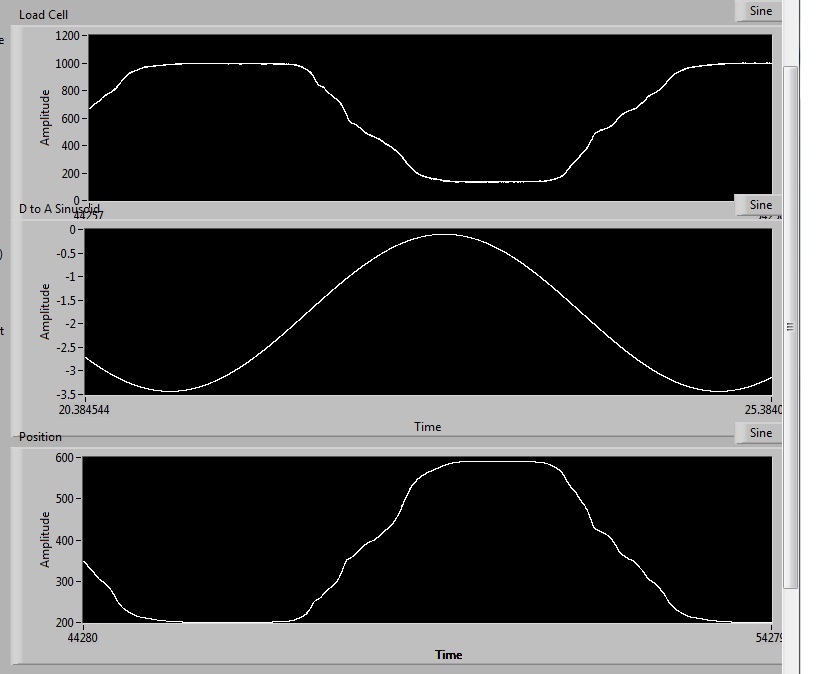
Im having trouble with an application of linear motor control. I'm using a servo-motor/converter to power a linear drive. The player is running in current/torque mode so that the output power/force is proportional to an analog input that is sent to him (no setting parameters). For this particular application, Im using the express vi 'set up fake signal' to create a waveform of sin that is used as the target value then inturn helps determine the voltage sent to the engine and thus, out of power. The tension of a load cell is then read through PCI-6014 and convetered at a level that can be compared with the output of analag, scale factor for the torque mode. There is also a PCI-6601 used to determine the position, but should not be relevant here.
Without PID. Using a load cell, I see that the wave of fishing is truncated at the top and bottom, it rises to fast in response to the tension and then from the trays. The reverse happens when unloading and it reaches a low load to soon and there is also the truncation. I will attach a figure which can demonate the problem better than I can explain it.
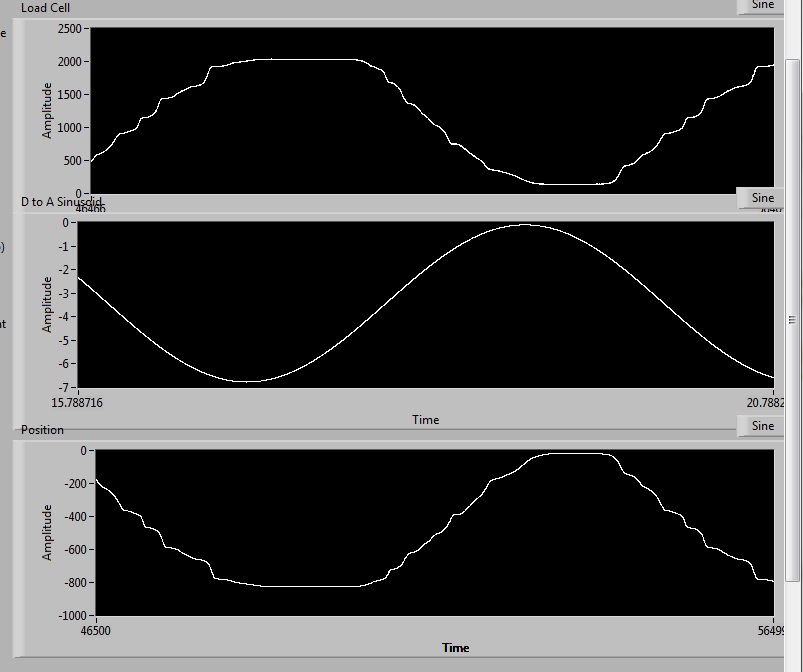
Without PID. This isn't a saturation effect, but as I can raise the amplitude of the input voltage and the force will follow the same type of waveform, but again the load levels. Ill. attach a screenshot 2 new levels of load of 2000lbs.
I can look at the levels of current/voltage output of the command servo which feed the linear actuator and that they are the sinusoids perfect, after all what is the input voltage, if guided by PID or not, its a mirror right, without truncation as occurs in the above figures. There is also no problem of speed or acceleration, it is well under the speed limit, that this system can work, IE under 0.25htz and it can run 50htz to these displamcements. So, these are not the problems.
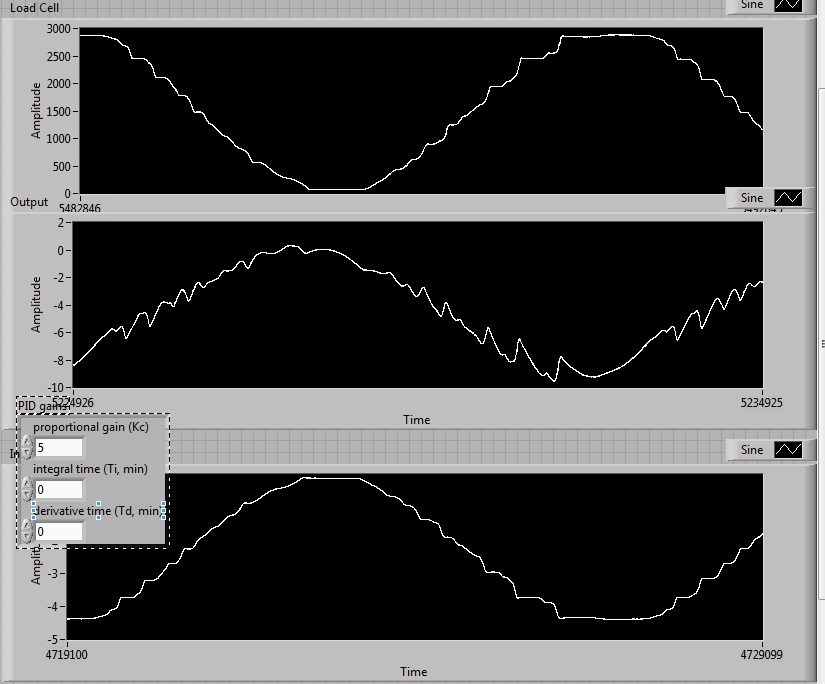
As I understand it, the PID is commonly used to correct this type of problem and is standard with machines that need to produce force in this way... Infact, I learned from the people who make the drive I use to fix this type of problem. Yet, Im could not get it to work. I tried to change the P term accoring to the N? I have the document below and dosent seems to correct the loss of crete, so Im doubtful the I terms or D will do much (and have tried without success). I'll attach a third screenshot and link in the general guide for the PID below
http://zone.NI.com/DevZone/CDA/tut/p/ID/3782
with the PID, with P increases so some departures of instability
Ive tried reinstallilng labview on a different computer, with PID and get identical results.
I'll join the code I help him, not that I'm waiting for anyone to find, its big enough.
Any help is greatly appreciated.
Jimmy,
If your control loop does not work with a deterministic timing, the highest rates of change of the setpoint to the situation, so the quality of the control loop also limits the frequency of your sinuses. However, the loop itself is always on to 2 kHz, so the loop time and jitter of the same order of magnitude, then it will be very difficult to get a system of stable control with this configuration. Reduction in the rate of control loop is also not a solution, because the linear motors are very dynamic systems, requiring control loop series kHz.
To improve the situation with your current setup, you can always try to better structure your vi, delete dynamic memory allocations and so forth, but the improvements will be very limited. In fact, there is a reason why NEITHER a lot of success with products such as LabVIEW RT or compactRIO and the reason is the deterministic behavior of these platforms that is required by the dynamic closed-loop control applications.
To answer your question on the amplitudes: regulator PID tried to generate an output signal, which translates as the set value - PV = 0. So for example, if your load cell outputs 0.5 V/N and you want to generate a force of 10 N, the set point must be set to 5. In other words, the scales of the setpoint and the PV must match, but this does not mean, you must necessarily across the PV before you go to the PID controller. Instead you might evolve set points to map to the copying. The advantage of this approach is the fact that you don't have to do calculations online on the feedback signal, because you could precalculate a set value table before you start the move. This approach would calculate you your calibration data in the matrix of setpoint values.
If you follow this method, you might also think of using a control chart of standard movement as a PCI-7352. This Council deals with all onboard, real-time control tasks so no LabVIEW RT is necessary and you can move the locker bays precalculated in the memory of the Commission (contouring mode).
I hope that gives you some ideas how to proceed from here.
Kind regards
Jochen
-
Printer LaserJet 4100: Should which cable I for Laserjet 4100 connected to the laptop with USB port
I have the HP Laserjet 4100 printer. I bought a new laptop with USB ports. What type of printer cable I need to connect the printer to my laptop? Is there some kind of printer cable adapter, or something else that will do the trick?
I have the same question about my HP Laserjet 1100 printer.
Thanks in advance for your assistance expected.

If I remember correctly, the 1100 uses a cable "C", alias MicroCentronics. Have never seen an adapter for that one. On the 4100, you can get a USB to parallel adapter. They are pretty cheap and available at most CESS (Consumer Electronics Super Store) as Best Buy. Staples and OfficeMax/Office Depot should also wear. Online is cheaper if you have time to wait.
The thing with these USB converters is often must 'install' the cable first. In other words, connect it to the laptop, then wait so he could install, then connect the printer. Depending on your operating system and if you have correct updates that can be almost instantaneous, and you may not even see it pop on the screen.
Best idea is that since these are obviously not portable machines, connect them to your router via a network card. I had the 1100 years and used a cheap 170 X. I know most recent are available which are faster.
For the 4100, see if you can retrieve a Jet Direct 620 unit on eBay. Probably less than $50 and sometimes even as little as $25. Stay away from the 600, 510 or 615 cards. Low or as the 600, they can leave your network open to hackers. No need to get Gigabit cards as they will be well above what the 4100 can handle.
Now, two of these old devices, processing power and memory can be a problem. Never try to print documents online. Save them on your laptop, and then print. You will probably get communication errors if you print directly from IE or FireFox.
If the 1100 does not die, not even worth fixing. Put into a Fuser is a nightmare. The 4100 will probably work for another 20 years if you keep to clean and replace the rolls before they cause jams.
-
How to do an image have several clickable camp arrives with a box next to the image with a text. as I click on a bone in an image a box comes up next to the image with which are the OS. I have cs6
This article has very clear steps & description of what you're trying to accomplish:
http://Demosthenes.info/blog/537/enhancing-Imagemaps-with-CSS3-popups#wheelset
-
Audio iPhone 7 and high resolution
Hi-
Thinking of buying iPhone 7. I notice that the DAC is now external to the phone for headphones cable good lightning and even lightning to the 3.5 mm adapter contains a small DAC inside.
What this means that iPhone 7 accepts high resolution audio files? (I'm talking about 24 bits, files of 192,000 kHz with flow rates up to about 9 216 kbps, like the ones you can buy Pono music or other titles HD).
The Apple store now sells items such as the helmet Planar Audeze with high quality converters.
Has anyone tried this yet? It may convince me to upgrade my iPhone 6. (I currently use one of those Toblerone shaped players Pono for hi res music).
Hi there, Phlac!
Thank you for joining the communities Support from Apple! It's a big question about the audio formats supported by iPhone 7. See this link which has the Technical Specifications for iPhone 7.
Audio playback
- Audio formats supported: AAC (8 to 320 Kbps), AAC protected (from iTunes Store), HE - AAC, MP3 (8 to 320 Kbps), MP3 VBR, Dolby Digital (AC-3), Dolby Digital Plus (E-AC-3), Audible (formats 2, 3, 4, Audible Enhanced Audio, AAX, and AAX +), Apple Lossless, AIFF, and WAV
- The user configurable maximum volume limit
Any audio that works perfectly with the iPhone 7 falls in these formats! Have a great day!
-
Can Tecra A10 - I install 1 TB hard drive?
Dear forum
I think put a 1 TB of HARD drive in the laptop. Please anyone know this model can take any hard drive 1 TB laptop please
Also this laptop can have 2 mounted hard drives please
Best wishes
IanUnfortunately, this kind of info is not found on the official pages of Toshiba and there is not any official document on these upgrades so that you can hope that someone with the same machine may publish specific experiences.
As far as I know this laptop model shipped with HDD of 250 GB max. Of course you can enhance it with the other HARD drive. I think that up to 500 GB should not be problematic.
Let's see what other people will write about it.One more thing: what operating system you want to install on this new HARD drive? Original recovery image?
-
Satellite L670-105 - HDD compatibility
I had to repair my Satellite L670-105 system partition, I believe that the HARD drive is MK6475GSX, as some groups failed, I think it would be prudent to replace the disk. Then I think to install a MQ01ABD100 with or without SSD addon (in any case the original part DEAMS ending), and I want to assure you about compatibility.
Thank you for the answers.
I also think you should replace the original HARD disk. It's the HARD drive with SATA interface.
In general you can enhance it with any 9.5 mm SATA HDD.In my opinion, you should increase the performance of s for laptop and improve it with SSD. More info on SSD you can pick up on http://storage.toshiba.eu/cms/en/index.html
-
Satellite 1400-503: what kind of RAM should I use?
It is pre-installed with 256 MB of RAM (I think) and I would like to enhance it with additional 256 MB in the free location. What kind of RAM I need? the preinstalled is a samsung with the inscriptions on it: Korea 0228 pc133s-333-542-81 L7A M46453254CT
Hello
I want to clarify that you can upgrade the memory to 1024 MB.
As far as I know Toshiba recommend using these memory modules:
PC133 512 MB (PA3108U - 1 M 51)
PC133 256 MB (PA3086U - 1 M 25)
PC133 128 MB (PA3085U - 1 M 12)But as you mentioned the laptop supports modules SODIMM 144 pin PC133 .
In this case, you use modules with these properties.
But I prefer the modules Kingston or Toshiba. You know that no names module performance is not very good.
Maybe you are looking for
-
HP Pavilion g7: can I upgrade the CPU in my HP Pavilion g7?
I have a HP g7 with an AMD APU A6 - 4400 m and 8 GB of RAM installed. I've had this laptop as a gift from my parents and often find myself with a high enough % of cpu in the Task Manager. It is just making multitasking normal and with a new install o
-
7610 officejet large format e - has: firmware
I got a new printer, and with my mac 10.9 the accompanying Cd is not approved to be updated. So, I guess I should donload and install the complete package of software/driver from the HP website. My question is: I also see option for firmware to downl
-
I have a HP Pavilion g6. (g6-1b81ca). I want to update my wireless card but I don't know if my bios has a whitelist or not. If so, is there an update of the bios without a whitelist?
-
Different GUI interface on RV220W
Hello Before, we bought RV220W we were amaze about the GUI-based features in the emulator in device https://www.cisco.com/web/sbtg/gui_mockups/RV220W_v1/home.htm it Now that we have the device we were surprised that we have is different from the emul
-
Installation of all using a vCenter Update Manager
I created a lab with 2 hosts ESXi (5.5.0) environment and a vCenter device (5.5.0).I need to perform a few tests using the Update Manager, but I was unable to find the procedure to install it.I understood that MU can be installed on the device of vCe