EoE EtherCAT
Hello
I wonder if the NI EtherCAT master driver support Ethernet through EtherCAT (EoE)? I tried setting up a Beckhoff EL6601 and get it set up in my project and it seemed to be active, but I wasn't able to route TCP/IP traffic through it. Someone at - he already tried this before? The properties of the EL6601 in my project of LV implies that it recognizes that the device supports the EoE, but nothing seems to go through it.
Thank you
Graham
No, unfortunately the master NOR support Ethernet over EtherCAT (EoE).
DirkW
Tags: NI Products
Similar Questions
-
cRIO is unable to enter active mode, because of the ethercat slave
I have a (CS27 of HBM) ethercat slave connected to a cRIO 9068. If I right click on the device HBM under the EthercatMaster and go to 'Device status online' I put first the State of the HBM "Operational Pre", "Operational security" and then "operational." The CX27 indicates the operational stae with a LED.
But when I try to put the cRIO in "active" Mode I get the error message:
-The analytical engine NOR could not be changed to active mode, because one or several devices to find could not access the operational mode.
The problem is finally solved.
The problem has been layout of different synchronization between the HBM and cRIO (801 vs 802) Manager.
Thanks to HBM to provide a firmware update to take in charge the provision used by OR!
-
Topology line EtherCAT with fiber/fiber converters
Hello
I have a request where I will order several NI 9144 slave chassis in a line of a master cRIO topology. The chassis must be 10kV + isolation from each other and the captain so I'll use converters of fiber on the link ethernet between each frame. The lengths of links are relatively short)<>
Fiber converters does meet a particular specification, and if so do you have any recommendations?
I'd better be using using standard Ethernet with NI 9149? I can cope without the deterministic calendar.
Thank you
Richard.
Hi Richard,
The EtherCAT protocol normally works on 100BASE-TX and can also run on 100BASE-FX (Sources here and here). I'm guessing that you have seen the KB that explains that you need for different cheating / hubs for EtherCAT and makes you wonder if the optical converters fall into this same category?
The need for special switches / hubs is because EtherCAT junctions stars work differently that normal Ethernet as the packages hubs need a particular routing. However, optical converters online and do not affect the sense go packages. They are just bit conversion of the tensions light pulses. The main thing to consider would be how much latency converters to introduce network - as this will eventually affect your EtherCAT minimum cycle time.
That said, NEITHER does not test the optical converters, but I've heard customers who use optical converters before (link sorry, not turned to the audience of reference available). As I mentioned above, the EtherCAT protocol specify how 100BASE-TX and 100BASE-FX, so I'll make sure the converter is in conformity with these standards.
-
Hi all, I am designing an application that will make use of several 9144 chassis for remote i/o EtherCAT. I need a minimum of a 2 kHz update rate with ~ 40-50 for this application on the EtherCAT ring channels (16 bit). After reading the EtherCAT documentation available on the Web site of NEITHER, it appears that the update rate is primarily limited by the analysis of the control engine because it is treatment in the real-time operating system and not the FPGA.
I also saw the benchmark EtherCAT here: http://www.ni.com/white-paper/52642/en/
Unfortunately this reference does not include the most recent RIOs Compact. Does anyone have experience with rates updated on the most recent cRIOs based on Linux (906 x series, x 903 series)? For those who have done this before, 2 kHz makes it seem like a reasonable rate update for 50 channels (over 3-4 EtherCAT frame) using one of these more recent cRIOs?
Shansen,
I think that you should be able to achieve rates of 2 kHz with new cRIO-903 x performance. However you must consider that there are other factors which could affect/bottleneck your performance.
-Architecture code is great. Inefficient code can cause a high CPU load and affect your timing.
-Module update rate. Your slower module usually defines the "maximum speed" of your system.
Tricks like disable debugging for VI mode or request a RT improves performance as well.
-
CVS1458RT, EtherCAT 9144, Softmotion
Hello
I just wanted to confirm.
I want to use a 9263 analog output and a diff 9411 channel installed on a chassis of 9144 EtherCAT.
I want then to use a CVS 1458RT and loop Softmotion RT to control those. (similar to the example: Interface for servomotors (9263 & 9401 & 9411))
The difference is that the EtherCAT FPGA o not available as in the example.
Is is possible? How? Using User Variables instead of the FPGA-defined reference node to write property?
Thank you
Patrick
Hello
Finally, by replacing any reference FPGA by the user-defined variable, everything works fine.
I replaced all references at the same time, FPGA VI and VI RT with the user-defined variable.
Thanks for help.
-
AOP of EtherCAT Slave not load completely from XML file
Hi all
I'm trying to import an XML file of Beckhoff device profile for the EL 6695 EtherCAT Slave in the LabVIEW project.
I brought changes to the Beckhoff as XML files so that all the 'user-defined AOP"is also included, when I connect this slave of my LabVIEW project.
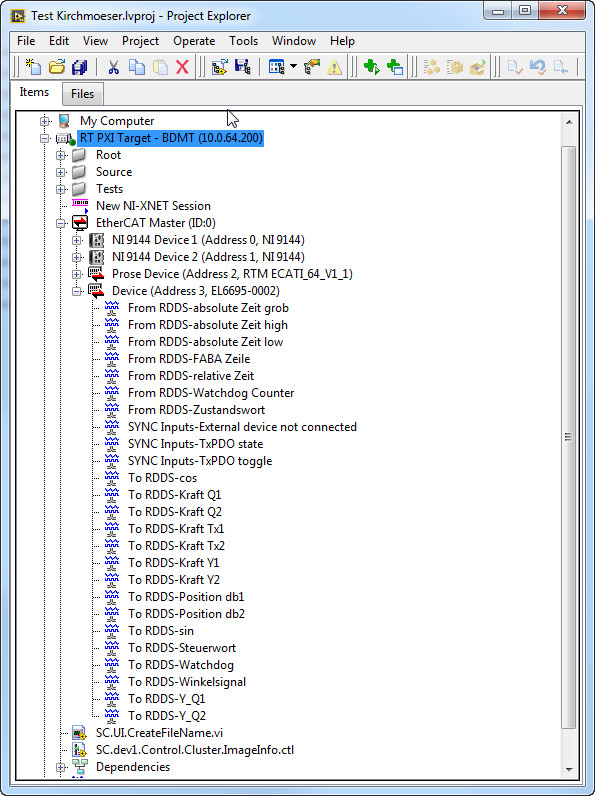
Screenshot below will give you an idea on my LabVIEW project.
In the screenshot, you can see the entries of the AO responsible for the EL 6695 ethercat slave.
The main problem here is that entered the AOP list / output entered is incomplete. I have 100 + entries "Of DDR" and even outputs.
Please let me know if anyone has an idea about this.
Thanks in advance!
Rahul.
Germany
Hi Raul,
Sorry for the end frequency! China observed holidays these days.
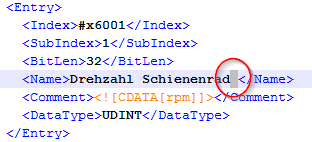
Finally, I found the cause of this problem! It's because of the extra 'space' behind the text of the name of the entry.
If all the entries after the entry of this issue will be ignored by LabVIEW. LabVIEW currently has some limitation to detect this. I go to your comments this problem to the right team to solve this problem in the future! Please see the attached XML, I modified according to your version.
Sorry to have caused you so much pain because of this!
Wendy
-
cRIO-9074 ethercat with a switch/hub between the cRIO and slaves
Hi, I have a cRIO9074 I'll use 7 JVL EtherCat Mac800 motor control. Engines are fairly spaced, so I use a switch of CU2005 EtherCat Beckhoff 5 ports between the readers and the cRIO with 2 motors in series on three legs and a motor on a port by itself. My problem is that labview will not find all engines unless one of the ports on the switch motor is plugged, or a line of engine is connected directly to the port ethercat cRIO. He has no problem see two engines on the same line, it just will not see one of them if more than one line of motor is connected to the switch ethercat.
Thus, HALP!
-
Servo on EtherCAT: parameter invalid when going from pre-op to SafeOp
Hello
I'm trying to control a 3rd party via EtherCAT servo drive:
- Material:
- Master: NOR-cRIO 9024
- Slave: Beckhoff AX5203
- Software:
- LabVIEW 2013 SP1 (32-bit)
- OR-Industrial Communications for EtherCAT 2.7
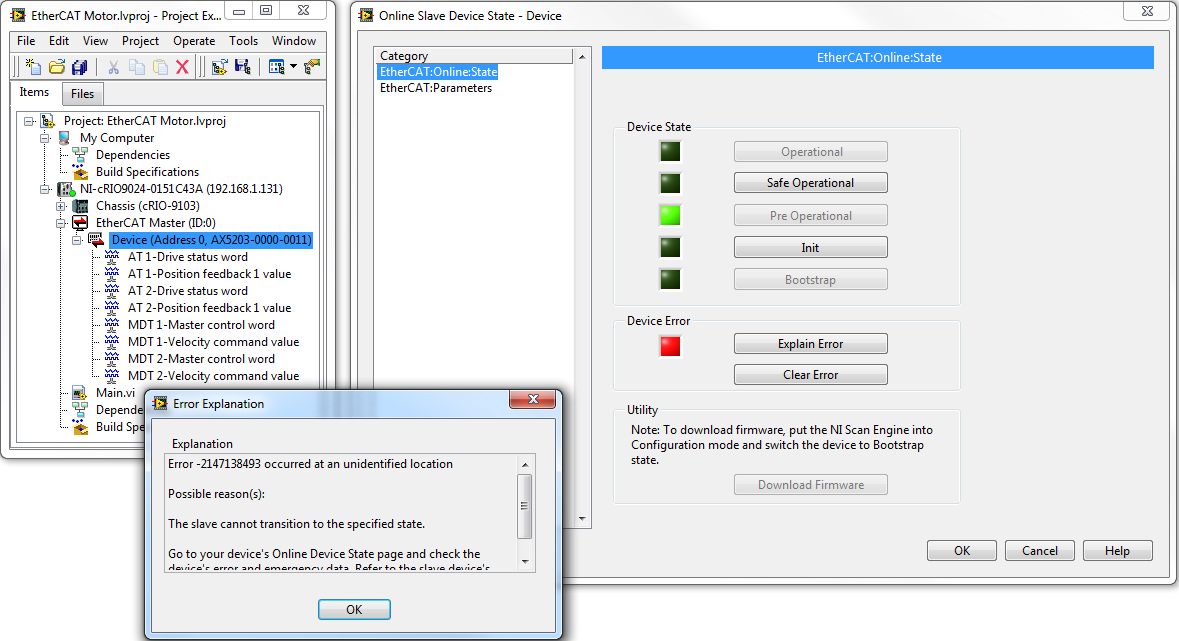
Use of the test panel LabVIEW (see image below), I am able to switch the slave between Bootstrap, Init, and States pre operational. The LCD screen on the slave displays the correct States I selected, so I know the basic EtherCAT link works.
However, when I try to transition from pre operational to the safe working condition, I get an error.
- LabVIEW, said 'the slave can not move to the specified state' (see image below)
- Display LCD slave displays error 0xF4A5, which, according to the website of Beckhoff , is "a parameter error has been detected in the SoE communication layer"
I'm at a loss at how to begin troubleshooting.
The explanation of the error says "go to the status page of the device your device online and check errors and emergency unit data. However, I find no error or given emergency in the Online slave device status page. There is that the "EtherCAT: online: State" and "EtherCAT: settings ' (picture above).
I wonder if this problem is related to any of the following:
- Import the XML device profile was not entirely successful. I described this to http://forums.ni.com/t5/Motion-Control-and-Motor-Drives/3rd-party-EtherCAT-slave-Importing-XML-Devic...
- My "EtherCAT: settings" page is empty, there is nothing in the dictionary of the object.
Advice would be greatly appreciated!
Hey,.
Obviously, NEITHER was able to get the ability to work with Beckhoff and supports so that officially AKD. So regarding NI Industrial Communications for EtherCAT supports the SoE, see the reply to your other post on the forum.
-
Part 3 EtherCAT Slave: importing XML Device Profile succeeds on host but fails on the target
Hello
I'm trying to control a 3rd party via EtherCAT servo drive:
- Master: NOR-cRIO 9024
- Slave: Beckhoff AX5203
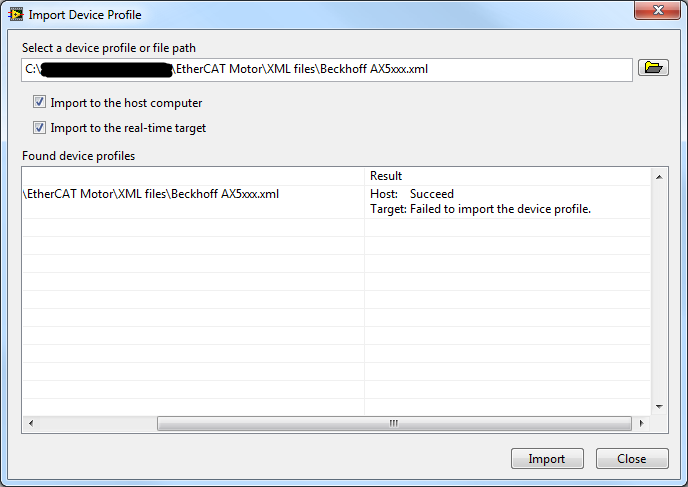
I downloaded the files of unit on official website of Beckhoff Description: http://www.beckhoff.com.au/english.asp?download/elconfg.htm (Beckhoff_EtherCAT_XML.zip)
I followed the instructions to http://digital.ni.com/public.nsf/allkb/FDA1318A8909D02C862574510060DB62 to import the profile description of the device.
Curiously, the import was successful for the host (and I can now access this device in the LabVIEW LVPROJ file), but it failed for the target.
Why could this be? (There are no diagnostic messages)
Hi JKSH,
Looks like you are using NOR-Industrial Communications for EtherCAT 2.7 or later. What is you project connected to the target when you try to import the file? How are you connected to the target? What is your firewall block FTP transfers? Do you need the ability to programmatically discover slaves EtherCAT (such as DSM or using the VI of Modules Refresh)? If you just want to program the EtherCAT Slave in the LabVIEW project, import the device description files to the host is all that is needed.
Best regards
-
Consumption of CPU resources with several EtherCAT devices
I use a cRIO 9074 as EtherCAT master and see extremely high CPU usage with only a handful of the deployed devices, nevertheless does not apparently works task from the CPU.
Installation: I use a simple loop of 100 Hz timed synchronized with the analytical engine that prints a message to the debug console each cycle and samples once CPU usage every 100 cycles. That I added several discs (3rd party engine Copley), I see the CPU load increase as follows:
Disks / use of the CPU
0 / 43%
1 / 67%
2 / 74%
3 / 81%
4 / 89%
5 / 95%
6 / 99%
7 / 100%
Keeping in mind that I'm not perform a different operation, including the AOP/SDO reads/writes, I would expect much better performance. Reportedly, EtherCAT is able to communicate with dozens of devices at rates of up to 1 khz. Is this a limitation of the controller I use, or I need to run another action for the consumption of resources under control?
Thank you
Patrick
I have discovered a solution to this problem.
I used digital I/O blocks of read/write, but is not connected to the terminals of the error. When I connected to the terminals of all serial error I see a massive reduction of the CPU and can reach loop rates of > 500 Hz... He also seems to have helped that I removed the foreign software modules which lowers the consumption of resources of reference on the cRIO.
-
Hello
I have a NI 3110 industrial controller, which controls multiple NI 9144 EtherCAT slaves. Due to the drift to inherit the clock in the controller, I need to set the absolute of the Windows part of the program time periodocally. I do that with success using the VI 'RT Set time and date' of the pallet in real time. However, after setting the time on the controller, the 9144 chassis an error 2147137804 - "Master is no longer sync'd with the acting as slave the reference clock device". To get rid of it, the only solution I've found so far is to turn engine active scan configuration and return to active mode.
Since this isn't a good solution to the problem, I wanted to know if there is a better?
Thanks for any help,
Christoph
Open the rt.ini - or on your RT target and look for the following section:
[TIME SYNCHRONIZATION]
source. EtherCAT.Enable = TRUE
source. EtherCAT.usable = TRUE
source.ethercat.masterID = 0
source_priority = ethercat;Change the first line
source. EtherCAT.Enable = FALSEThis will make the slaves are more to synchronize with the first slave. Instead, all slaves synchronize the master clock. See if this helps you in this situation.
DirkW
-
Communication with EtherCAT defective modules with executable startup
Hello
I have a deployment with a hypervisor OR 3110 and four NI 9144 chassis that are connected via EtherCAT. The RT VI I created works perfectly when they are deployed since in the LabView project. However, when I create a start executable (startup.rtexe), it fails somehow communicate with 3 out of the 4 chassis. I can read/set values for the frame that plugs directly into the hypervisor, but cannot control the chassis more far. If I build the executable to start with debugging enabled, the behavior is the same. Strangely, when I connect to the startup.rtexe running through the 'Debug Application or Shared Library' menu in the LabView project, I start getting values as it should. When I disconnect from the debug version, I lose the modules again.
What I'm missing here?
Thank you much for the help.
Christoph
I found the root of the problem: for iterations inside my call loops, I use property on variables unconnected (type defs) nodes to determine the number of iterations that I need. This doesn't seem to work if the FP is closed, as is the case in a deployed executable startup. If I replace these nodes of property with the constants, everything works as expected. It semms that the compiler removes variables unconnetced, because it "thinks" that they are not used.
-
Playback issues of Thermocouples a 9214 in EtherCAT 9144 chassis
I have an SMU-1078 chassis with an SMU-8135 controller and chassis EtherCAT 9144 with multiple C-modules, including a couple of 9213 9214, running Veristand 2014 and 2014, inertia. I updated last week so I think I have the latest updates for the hardware and software.
The problem I encounter is that I can read my Type K thermocouples with Thermocouple 9213 modules, but when I connect them to the Thermocouple 9214 module, I see only TC0 change and the rest of the TC 9214 channels are 0 ° c. tried to use high speed and high resolution modes, but no difference. I also moved the module in slot 8 in the EtherCAT chassis, also without success. Then I moved the 9214 with its connector and thermocouples to another machine with a chassis cDAQ in 9188XT and I have read all the thermocouples with NI MAX. This proves that the module is working and that the module connections are good.
I need to use the 9214 because of his ability to handle the higher common mode voltages. I need help. Please, I beg you.
Thank you in advance
Richard
It ended up that I had to download the last update, 14.0.1 for the NOR-RIO. This solves the problem. I did have to reinstall Veristand, Labview, or any other driver.
Thank you very much for your answers.
-
Installation of meter in EtherCAT
Hello
We will extend a configuration consisting of a connected to two EtherCAT 9144 with a few modules SMU-8108. The extension requires a third EtherCAT 9144 Garland to the second in the current configuration. This third EtherCAT contains among other modules (, AO and) an OR-9402 (quick DIO module) that is intended to be used for counting of pulse (count up to 100,000 rate / s). I have a similar setup with a cRIO as RT controller. Then I can set the input mode of the NOR-9402 as a counter. Simple, not bad at all. I was not aware that this is not possible when you use the module in a chassis EtherCAT. I tried to create a FPGA personality tailored, so far without success.
Is there an easy way to count the pulses with a C Series module installed in an EtherCAT 9144? Or is it just any native module count for the EtherCAT?
There is no easy workaround solution that allows to get a counter signals in the same project VeriStand?
Best regards
Karsten
Hi Karsten.
The local cRIO is supported by what we call "digital specialty" functionality for the analytical engine. Unfortunately, this is only supported on the cRIO targets and is not possible on EtherCAT hardware, why it is not available in the custom device.
You can certainly do count on your EtherCAT frame pulse, but you will need to program the FPGA. Once you have written the logic, you will need to write the results in "User defined Variables", which connect the analytical engine. If you look at my post at the top of this page, I explain the General steps of the procedure to follow.
If you are looking for, you will probably find some examples how FPGA code of pulse counting of a digital signal. Or maybe someone else can chime and you point to some examples...
-
CRio, Ethercat 9144, Ni9264, FPGA RT, cannot send signal AO to 9264 in Ethercat 9144
Greetings,
I am trying to send write them in a host program to a "user defined variable" AO for a NI9264 located in a module of Ethercat 9144, as the 9144 does not support an interactive control.
The FPGA vi compiles successfully but I get the error that the variable defined by the user that is associated with my AO control does not exist.
I can read values from other modules in the Ethercat 9144 crate from a host computer, but cannot write to the AO 9264.
Any ideas what I am doing wrong, other on the assumption that it is possible to perform this task on a CRio system?
Thank you
Jim
Hi S.,.
Thanks for the help. The problem has proved to be a problem with the installation of "User Defined Shared Variables." For the analog output of the module there is a tab in the shared property Variable that must be set to "Host to FPGA", for analog signals, it will be "FPGA to host."
Simple enough, I got a couple of them set up correctly but not all of my AO, so I got the error. And then, I got a question bitfile has been loading for the FPGA, a lot of things to follow, but it seems to work fine now.
Thanks for your reply, I feel into a solution reguardless.
Jim
Maybe you are looking for
-
My phone will not connect to my home WiFi. My iPad and Mac have no connection problem and nobody else comes to my house. I reset my router, restarted my phone and reset all my network settings, a countless number of times. Nothing seems to work!
-
Problem with MacPro, early 2008 gel
Help, please... I have a MacPro early 2008. I'm on Mac OS X Lion 10.7.5. Processor 2 x 2.8 GHz Quad - Core Intel Xeon Memory 8 GB 800 MHz DDR2 FB-DIMM ATI Radeon HD 2600 XT 256 MB graphics The question I have is this: my Mac freezes market throughout
-
Re: Satellite L40-14 b - exchange of CPU
Hello!I have Toshiba Satellite L40-14B... I want to change my CPU, but I can't find any info that I can use. Dual core, core duo or core 2 duo of? Please help me!Martin
-
Satellite M70-147 WLAN Wi - Fi drops
Hello Could someone please tell me what to do to avoid that my wireless connection WLAN oscillating randomly 54 2 and between the two?I have a 642 D-Link.OS = Windows XP Home SP2 Thanks in advance.
-
transistor for my diode-transistor vi equation
This is a diode and transistor vi. You can change transistor/diode under the graph. in the block diagram of the diode you will see that it uses an equation for the current. I put an equation and create the schema for the transistor also so I can see