CVS1458RT, EtherCAT 9144, Softmotion
Hello
I just wanted to confirm.
I want to use a 9263 analog output and a diff 9411 channel installed on a chassis of 9144 EtherCAT.
I want then to use a CVS 1458RT and loop Softmotion RT to control those. (similar to the example: Interface for servomotors (9263 & 9401 & 9411))
The difference is that the EtherCAT FPGA o not available as in the example.
Is is possible? How? Using User Variables instead of the FPGA-defined reference node to write property?
Thank you
Patrick
Hello
Finally, by replacing any reference FPGA by the user-defined variable, everything works fine.
I replaced all references at the same time, FPGA VI and VI RT with the user-defined variable.
Thanks for help.
Tags: NI Hardware
Similar Questions
-
Playback issues of Thermocouples a 9214 in EtherCAT 9144 chassis
I have an SMU-1078 chassis with an SMU-8135 controller and chassis EtherCAT 9144 with multiple C-modules, including a couple of 9213 9214, running Veristand 2014 and 2014, inertia. I updated last week so I think I have the latest updates for the hardware and software.
The problem I encounter is that I can read my Type K thermocouples with Thermocouple 9213 modules, but when I connect them to the Thermocouple 9214 module, I see only TC0 change and the rest of the TC 9214 channels are 0 ° c. tried to use high speed and high resolution modes, but no difference. I also moved the module in slot 8 in the EtherCAT chassis, also without success. Then I moved the 9214 with its connector and thermocouples to another machine with a chassis cDAQ in 9188XT and I have read all the thermocouples with NI MAX. This proves that the module is working and that the module connections are good.
I need to use the 9214 because of his ability to handle the higher common mode voltages. I need help. Please, I beg you.
Thank you in advance
Richard
It ended up that I had to download the last update, 14.0.1 for the NOR-RIO. This solves the problem. I did have to reinstall Veristand, Labview, or any other driver.
Thank you very much for your answers.
-
CRio, Ethercat 9144, Ni9264, FPGA RT, cannot send signal AO to 9264 in Ethercat 9144
Greetings,
I am trying to send write them in a host program to a "user defined variable" AO for a NI9264 located in a module of Ethercat 9144, as the 9144 does not support an interactive control.
The FPGA vi compiles successfully but I get the error that the variable defined by the user that is associated with my AO control does not exist.
I can read values from other modules in the Ethercat 9144 crate from a host computer, but cannot write to the AO 9264.
Any ideas what I am doing wrong, other on the assumption that it is possible to perform this task on a CRio system?
Thank you
Jim
Hi S.,.
Thanks for the help. The problem has proved to be a problem with the installation of "User Defined Shared Variables." For the analog output of the module there is a tab in the shared property Variable that must be set to "Host to FPGA", for analog signals, it will be "FPGA to host."
Simple enough, I got a couple of them set up correctly but not all of my AO, so I got the error. And then, I got a question bitfile has been loading for the FPGA, a lot of things to follow, but it seems to work fine now.
Thanks for your reply, I feel into a solution reguardless.
Jim
-
Can not get EtherCAT (9144) to recognize CAN module (9853)
I have a cRIO system which consists of a RT 9024 controller in a chassis 4 slots and a separate, distant 9144 chassis EtherCAT 8 locations. The 9144 has the usual assortment of, AO, modules etc., and it also includes a CAN of 2 ports 9853 module. When I try to use the "add devices on FPGA Target and targets", the 9853 appears as a 37670 NOR, with the comment "This C Series module no is not supported by current versions of LabVIEW and NOR-RIO." For reference, I use LV2009 SP1 and NEITHER-RIO 3.4. Even more confused: if I have the 9853 leave the 9144 chassis 4 slots (no EtherCAT) and try to add it to the target FPGA that chassis, it works without any problem. Is there a problem with CAN via EtherCAT? This thread seems to imply that it is possible, although this poster had different questions.
Suggestions as to what I have or NEITHER could hurt?
I hope that you have seen that the second port CAN1 needs external power?
DirkW
-
Get the absolute time on a chassis ethercat 9144 in labview fpga
I'm testing the timing and synchronization of a distributed system, consisting of an OR-cRIO-9082 and two ethercat NI 9144 chassis. Is it possible to access the system on the 9144 absolute time of in the FPGA?
Thanks for the reply. In fact, I just figured this out a few moments ago. It is possible to add a timestamp to a variable that is defined for the user by selecting 'Enable Timestamping' on the user defined variables properties dialog box. This timestamp does what I want, because it uses the absolute time of the 9144 (that is synchronized with the master clock), and this time can be read on the host/Master.
At least I think it does what I want. I'm in the process of coding and testing right now.
-
NI 9144 EtherCAT and part NI 9213 using 3rd EtherCAT master settings
I want to change a setting (the setting of the speed) on the 9213 when using the EtherCAT 9144 module. I use a 3rd party EtherCAT master. I can use an EtherCAT configuration tool to change the speed setting. I want the 9144 9213 material to always start with this mode (default).
My questions are:
- This setting of the speed in the 9213 be saved? If Yes, where?
- This speed setting get recorded in the EtherCAT ENI file?
- Or do I have to send specific configuration commands via the Council of Europe whenever I initialize the EtherCAT using the master of the 3 rd-party?
Thank you
It is a sequel to my previous post.
The XML above, when adding to the file EtherCAT ENI, will correctly set the speed controller. I tested on a 9213.
If you are using a master of EtherCAT 3 rd-party with 9144 modules, you will need to connect to some form of EtherCAT configuration tool to generate the EtherCAT ENI file. The configuration tool will be an option to add startup commands in the file of ENI. These product start additional xml commands I listed above.
-
Installation of meter in EtherCAT
Hello
We will extend a configuration consisting of a connected to two EtherCAT 9144 with a few modules SMU-8108. The extension requires a third EtherCAT 9144 Garland to the second in the current configuration. This third EtherCAT contains among other modules (, AO and) an OR-9402 (quick DIO module) that is intended to be used for counting of pulse (count up to 100,000 rate / s). I have a similar setup with a cRIO as RT controller. Then I can set the input mode of the NOR-9402 as a counter. Simple, not bad at all. I was not aware that this is not possible when you use the module in a chassis EtherCAT. I tried to create a FPGA personality tailored, so far without success.
Is there an easy way to count the pulses with a C Series module installed in an EtherCAT 9144? Or is it just any native module count for the EtherCAT?
There is no easy workaround solution that allows to get a counter signals in the same project VeriStand?
Best regards
Karsten
Hi Karsten.
The local cRIO is supported by what we call "digital specialty" functionality for the analytical engine. Unfortunately, this is only supported on the cRIO targets and is not possible on EtherCAT hardware, why it is not available in the custom device.
You can certainly do count on your EtherCAT frame pulse, but you will need to program the FPGA. Once you have written the logic, you will need to write the results in "User defined Variables", which connect the analytical engine. If you look at my post at the top of this page, I explain the General steps of the procedure to follow.
If you are looking for, you will probably find some examples how FPGA code of pulse counting of a digital signal. Or maybe someone else can chime and you point to some examples...
-
deploy the project with Ethercat
Hi all!
I need help. I created a project that consists of two parts. The host to run on a Standard PC (HMI display...), that the second part is working on a controller PXI (RT) linked to an Ethercat 9144. I have my project debugging and everything works perfectly, I am able to read variable Ethercat of host, send data to the RT using shared variables...
To complete my project, I wanted to create an exe for the RT. This is the beginning of my problems. I built the executable, set it as start and deploy the exe to the target. After rebotting target, I started the application on the host... Now, it is impossible to read Ethercat variables and variable shared. If I try to set up the shared variable or the Ethercat for the project, it stops the executable that runs on the target...
I have not found any documents that describe how to deploy variable Ethercat in an executable... Does anyone have an idea about this problem? any suggestion is welcome...
When running a windows project, libraries RT SV are usually defined to deploy automatically when the application of the RT is deployed. Also you can manually deploy libraries SV yourself project.
Once a SV belonging is deployed on an RT target that it will stay there until eliminated. You can verify your deployment with Distributed System Manager (DSM) If you see it then you're good.
Your RT exe cannot deploy its own libraries, they should be deployed in advance. In addition, you should be able to use the DSM to see the IOV engine on the 9144 chassis analysis even if your RT application is not running. Check this first. Also check the on your target RT .alias file to make sure it has the appropriate IP addresses to resolve any URL NSV.
-
Hi, I just tried setting up the chaisis ethercat 9144 with a module of the series nor 9860 c and crio 9035 is the master. But I can't get the module to appear in the project. The 9860 module is supported by the chaisis ethercat 9144? If this is not the case, how can I solve this problem? Because the 9860 NOR can be used in interface to scan mode and I don't wan't to run it on the crio 9035 because then I'll have to use the hybrid mode.
Thank you.
Based on the product page, I would say the 9860 is not compatible with the EtherCAT frame. It should work directly on your cRIO-9035 however.
-
variables of user-defined data transfer
Hello
I use the etherCAT 9144 chassis and is only supported by this hardware FIFO range target. After a search, I realized that the only way to transfer data from FPGA to the host by using user-defined variables. But these variables do not support the notion of FIFO. So which is the best practice to transfer data after measures (provable 10 Hz measurement of 15 values) to host VI?
Thank you
As mentioned, the 9144 only supports the analytical engine.
In regards to what you do, it really depends on the entire application. For example, what is the master? Are there other systems at issue here? Etc. It's a good read, in general, although it might not help this second right: http://www.ni.com/white-paper/14151/en/
A high level, you need to decide what you need. If you have need for deterministic communication, low-latency over long distances from a RT controller, the 9144 is probably the right choice. If you need low latency + streaming over short distances to a RT controller, you should look into the RIO MXI chassis. If you need mainly not deterministic low speed (10 hz) data mixed with low flow continuous over long distances to a windows or host RT, then ethernet expansion rio (9146,7,8,9) is probably the right choice. If you need high speed continuous with low control latency over long distances to a windows or RT host, you need a full cRIO controller. Based on what you've posted so far, its uncertain is the right person.
Lets say you're stuck with the 9144 for now. As you can easily hit 1 kHz scanning cycles, it should be perfectly possible to data 'stream' to 10 Hz. If you run the scan at 1 kHz engine, then you are 100 x oversampling. Where it gets complicated is this requirement of sync. By default, acquisition input/output is synchronized to the clock of the scan (and you can see when the clock of scan is set by a knot of e/s FPGA). However, you can take complete control of a module in the FPGA and read inputs and outputs at any time if you please. In other words, you can set up so when DIO0 goes high you immediately enjoy all the values of AI 15. You can then transfer these values HAVE switched to the host using the user-defined variables.
-
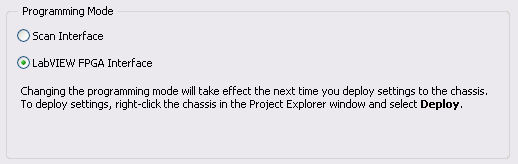
Why do I get an error when I try to change the mode of scanning by programming engine?
Hello
I have a problem with my EtherCAT system.
The system contains:
a RT PXI-8840
2 position with EtherCAT sensors
and 8 inverters with EtherCAT (with Softmotion plugin and xml file)
I use LabVIEW 2015 with RT and FPGA Softmotion module.
At the beginning of my code I pass the engine scan mode in configuration mode and then the active mode programmatically. It works well when I start my code with LabVIEW but I get an error when I use a startup application. The error code is-2132869095 (the deployment link has expired). I've tried also with a code containing just the screw for the switching of the mode of scan engine and nothing else. With this, I get the same error.
The problem occurs when one or more inverters are involved in the project.
Anyone an idea what I need to do to avoid this error?
Thank you.
Hello
the two cases mentioned in my last post have solved the problem. I have to follow this exact sequence and I expect that the analysis engine is running.
Now, my startup application runs.
-
Serial number of modules (programmatic conversion)
Hi all
I am the serial number of modules of reading in my NI EtherCAT 9144 chassis by programming using the shared variable property node. The value obtained in my program is completely different from this serial number on the module. For example that I'm reading the serial number of the module NI9234, serial number that I got from the program was 25182428 the series but real present on the module number is 18040DC. Could you please see this and let me know what problem I'm facing? or y at - it all conversions that I do. Here is the picture of my code.
Thanks in advance
A watch in decimal, the other is hexadecimal.
Change the display format for your digital indicator.
-
How to use the target FPGA and co. on the same chassis cRIO?
I have a cRIO system consisting of a master chassis 9074 with several modules IO and EtherCAT 9144 slave unit.
I want to run a CIE (see: http://zone.ni.com/devzone/cda/epd/p/id/5333) on the chassis of the master, this uses the analytical engine. At the same time I have to do some very urgent measures if I want to use the Board in hybrid mode, using analysis and FPGA engine at the same time (as described here: http://digital.ni.com/public.nsf/allkb/0DB7FEF37C26AF85862575C400531690.)
But as soon as I add the FPGA target at one of the chassis, the feature of the ice on this chassis stops working. After some research, I found that the CIE can initialize is no longer the modules belonging to the frame that has the target FPGA on it. Error in the method Init of the CIE is: 65700 (indeterminate). This occurs when you try to use "for a more specific class' on the modules configured with a target FPGA on it.
Someone knows what can cause exactly this problem and perhaps provide a solution/work around?
Many thanks in advance.
Hybrid mode requires you to have a bitfile compiled running on the FPGA to be able to read the Scan Interface IO Variables. Move the target FPGA at the RT target module will allow Interface of scanning for this module, but the frame will always mode Interface of LabVIEW FPGA.
To get fair access to the scan mode for the frame, right click on the chassis in the project, and choose Properties. Then, modify the Scan Interface programming. If you want to continue using the programming of FPGA and the Scan Interface set (hybrid mode), you will need to compile a bitfile (empty if you do not want programs on the FPGA again or containing your FPGA code). By compiling, the support of the module scan mode for the modules under your RT chassis is compiled in your custom bitfile. Then, on your VI RT, you need to use reference FPGA VI open to your newly compiled VI. Once this VI is deployed and ongoing implementation, you get the data from you are the CIE.
For more information, see this knowledge base article and Reference Interface of Scan CompactRIO and procedures.
-
How to set up a type of thermocouple in FPGA on cRIO 9074 + modules 9211
Hi all.
Could someone displays an example of VI pour set the type of a module 9211 thermocouple mounted on a cRIo9074 + ethercat 9144.
After several searches on the forum or in the various labviews, I have nothing concrete to this topic.
FYI, I realize a project to track T ° on a machine using the cRIO 9074 + ethercat with display on a Touch Panel (touch screen).
All scan mode in works well. Plug-in of the shared variables to send different surveys on a corporate network so that the Panel button can display this information. A remote PC of supervision may also fetch the info.
My problem today is to be able to choose the type of thermocouple perono LUN VI without having to him by ironing my project and deployment of my modules after changes.
Thanks in advance.
Thanks for the reply.
I had already seen this example but I thought that there was some chose more "simple".
I'm going to use up to 9 modules 9211, which will fatten the VI but it should go.
Thanks again.
-
Hi all, I am designing an application that will make use of several 9144 chassis for remote i/o EtherCAT. I need a minimum of a 2 kHz update rate with ~ 40-50 for this application on the EtherCAT ring channels (16 bit). After reading the EtherCAT documentation available on the Web site of NEITHER, it appears that the update rate is primarily limited by the analysis of the control engine because it is treatment in the real-time operating system and not the FPGA.
I also saw the benchmark EtherCAT here: http://www.ni.com/white-paper/52642/en/
Unfortunately this reference does not include the most recent RIOs Compact. Does anyone have experience with rates updated on the most recent cRIOs based on Linux (906 x series, x 903 series)? For those who have done this before, 2 kHz makes it seem like a reasonable rate update for 50 channels (over 3-4 EtherCAT frame) using one of these more recent cRIOs?
Shansen,
I think that you should be able to achieve rates of 2 kHz with new cRIO-903 x performance. However you must consider that there are other factors which could affect/bottleneck your performance.
-Architecture code is great. Inefficient code can cause a high CPU load and affect your timing.
-Module update rate. Your slower module usually defines the "maximum speed" of your system.
Tricks like disable debugging for VI mode or request a RT improves performance as well.
Maybe you are looking for
-
iWatch portfolio syncs with the iPhone of boarding.
iWatch OS3.0 and iPhone 6 more iOS 10.0.2, I deleted boarding used in my iPhone wallet cards and added new boarding, but iWatch portfolio do not sync with my iPhone portfolio. How can I fix this without resetting the watch together?
-
When I upgraded to Firefox for Mac v22 to v23, the tab bar began to appear on EACH PAGE automatically, even when I did not open several tabs. How can I get rid of the tab bar? I didn't use tabs and prefer open windows instead of tabs. Thank you.
-
HelloI play Farmville and there are a few months when I updgraded FF - whenever I connect to FV, a small window appears on the side and my FV guard reload times and whenever he reloads a new small window pop - up is displayed. Can someone help me ple
-
Satellite M40X-230 memory upgrade
Upgrade memory I have a satellite M40X-230, most of the documents indicate that it is expandable up to 2 GB of RAM.On the underside there a memory expansion slot which will have a 1 GB SODIMM, giving me a total of 1.5 G bytes of RAM. Is it possible t
-
Photosmart 7520: Printer Wifi connectivity Photosmart 7520
This printer works well in a small office environment with a Wi - Fi connection. It has been moved to a home office a piece. The printer is installed with a wireless connection and works immediately after installation. An attempt to print after th