Unable to connect to a real-time target... ugh I give up!
This one is really frustrating... I did a lot with Labwindows for a long time, so get in... I just installed LW/CVI 2013 on a new machine in my lab. hooked to a new PXI chassis, formatted a new disk in and installed all the drivers. When you try to connect to the target environment labwindows I get the popup in the screenshot. As you can see, the chassis is on the network, to the good ip, and the drivers are installed on the target... What is the problem! Thank you.
Hello
This is the acutally NOR Configuration system that comes with MAX and interferes during the installation of the CVI real-time on the target.
Decommissioning of MAX should solve the problem.
If you don't want to upgrade to CVI real-time Module to 2013 SP1 there is also a work around:
Edit C:\Program NIUninstaller Instruments\RT Images\CVI\version\cvilvrt.cdf and do one of the following:
Remove the entry from CVIRealTimePeer.
Specify the IP address or desired host name.
Reinstall the LabWindows/CVI runtime for RT component to the target via NI MAX.
Good day
Constantin
Tags: NI Software
Similar Questions
-
Real-time target - change IP and shared network varables
Hello
I create an application for the system in time real (Compact RIO).
All data between the (current running on a windows PC-based) GUI and the real time system - is transferred via shared network variables.
Shared variables are hosted on the target.
I attributed the static IP address to the real-time target.
Now for the question:
After the deployment of the application in real time on the Rio target compact
If I change the IP address of the target: how the shared variables 'know' to connect to the target?
There is no place in the GUI (running on windows PC based) I set the IP address of the target.
So I change the IP Address of the target (and for the sake of argument if I change the IP address of the PC, but they are always on the same subnet) - how to 'know' how to connect?
Looks like a basic question I am absolutely certain I'm missing something to understand shared variable...
Thnaks
Hello Hazkel,
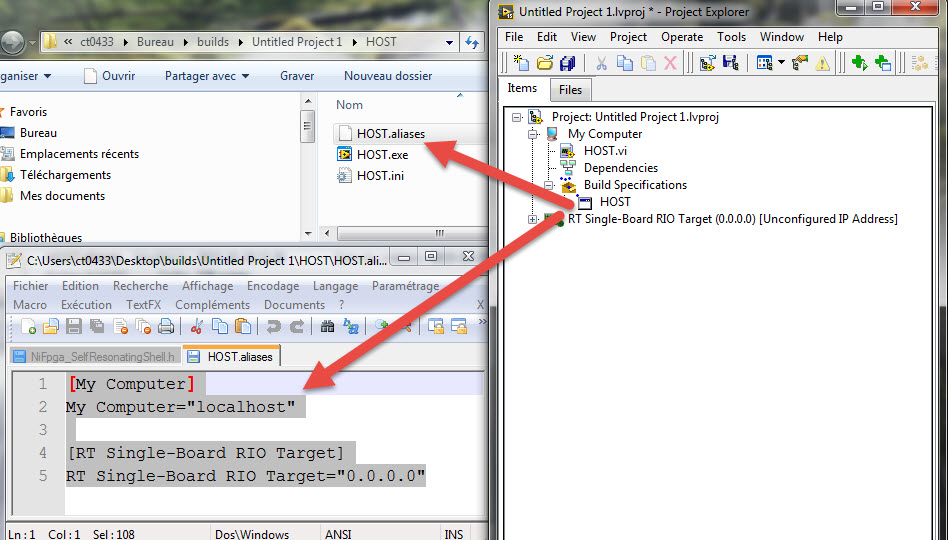
The IP address of your shared time variable real target is located in the *.aliases file when you create an executable file, you will need to change there. See the example below:
-
Debugging on a real-time target - deployment issues
Dear community,
After RT my 9651 sbRIO module wiring code, I do tests to check the intended functionality. For this I start my main VI who deploys the code on my SoM and I can happily move forward with my debugging session.
Sometimes, however, while in the process of deployment, I get an error saying:
[VI - name] .vi loaded with errors on the target and was closed
When I open the VI it has no errors and the VI should work a fine might think.
My solution was so far of the VI, just open move the wires and terminals round, re - save the VI and this is the deployment works.
This trick worked for a while, because deployment error ca occur arbitrarily on different VI making debugging quite cumbersome.
I then went ahead and just run the wrong VI in RT mode by moving terminals and structures around to get the VI runs in mode debugging, but it is very time consuming.
Given that 3 people working on this project and we use git-subversioning I also do not want to "touch" each time just screws for the debugging session will without actually modifying the feature.
Has anyone encountered a similar experience or perhaps found a magical setting to avoid this subject a lot of time?
Hello
If solutions already present Spex does not do the trick for you, clearing the cache of the compiled object can help.
For more information, take a look at the following link:
Why my screws are loaded with errors when it is deployed at my target in real time? -National Instruments
http://digital.NI.com/public.nsf/allkb/7F6502FF0560FA9086257EB3005B13BAConcerning
Alex
-
where the daqmx on real-time target files are stored?
Hello
I'm working on an application that is embedded in a desktop RT target. To make the system easier to maintain in the future, I would like to be able to generate a DAQmx task programmatically to the *.ini file exported from MAX. In this way, users don't know what my code does to recalibrate the sensors or manage new material; they only know how to use MAX and where to store the files in config on the target.
Where are the task daqmx, channel, and scale information stored on an RT target? I have been through the files on the target you are looking for something that contains my task data but have found nothing, while dropping a node of system property in a VI running on the target will give a correct list of the tasks that I set up. (The project that contains the aforementioned VI has no tasks in it IE: I do not import into the project.)
Is there a utility that runs on the RT target that can generate a task at the time of the *.ini files exported?
Thank you
Exahustive keyword search led me to an answer on the forums. I'll post here a brief summary in case someone else uses the same key words I.
1 export the MAX configuration file
2. write a VI that uses tools in the system palette to load the configuration on the target in real time.
3 profit.
In my case, the VI I wrote to download the config DAQmx also generates the configuration files for the screw on the side host and target, so everyone knows what is called tasks.
-
Error trying to create the exe for real-time target
I have a target program that works well on target in real time, but hangs when I try to create an executable fron, error is:
An error occurred during the recording of the following file:
C:\Program NIUninstaller Instruments\LabVIEW 2009\vi.lib\Motion\FunctionBlocks\straightLineMove\nimc.fb.straightLineMove.startStraightLineMove.axis.modeVelocity.0.vi
Invoke the node in AB_Source_VI.lvclass:Close_Reference.vi-> AB_Build.lvclass:Copy_Files.vi-> AB_Application.lvclass:Copy_Files.vi-> AB_RTEXE.lvclass:Copy_Files.vi-> AB_Build.lvclass:Build.vi-> AB_Application.lvclass:Build.vi-> AB_RTEXE.lvclass:Build.vi-> AB_Build.lvclass:Build_from_Wizard.vi-> AB_UI_Frmwk_Build.lvclass:Build.vi-> AB_UI_FRAMEWORK.vi-> AB_CreateNewWizard_Invoke_CORE.vi-> RTBUIP_CreateNewWizard_Invoke.vi-> RTBUIP_CreateNewWizard_Invoke.vi.ProxyCaller
Method name: Save target: InstrumentVisit ni.com/ask support request page to learn more about the resolution of this problem. Use the following as a reference:
Error 6a held at AB_Source_VI.lvclass:Close_Reference.vi-> AB_Build.lvclass:Copy_Files.vi-> AB_Application.lvclass:Copy_Files.vi-> AB_RTEXE.lvclass:Copy_Files.vi-> AB_Build.lvclass:Build.vi-> AB_Application.lvclass:Build.vi-> AB_RTEXE.lvclass:Build.vi-> AB_Build.lvclass:Build_from_Wizard.vi-> AB_UI_Frmwk_Build.lvclass:Build.vi-> AB_UI_FRAMEWORK.vi-> AB_CreateNewWizard_Invoke_CORE.vi-> RTBUIP_CreateNewWizard_Invoke.vi-> RTBUIP_CreateNewWizard_Invoke.vi.ProxyCaller
Possible reasons:
LabVIEW: File generic i/o error.
=========================
NOR-488: IO abandoned operation.The second was the issue, I found myself actually apply to open with an engineer and he helped me. Thank you very much!
-
RT - set the time of real-time target in MAX
Hello
I want to manually change the time on my target in time real (cRIO-9022) with MAX
I followed the steps described here.
In step 2, when you install the remote system OR 14.5.0 Configuration Support
I get the following error message when you try to install:
"Labview real-time 12.0.1 requires the service locator 1.0".
On the host computer, I had SP1 2013 Labview with the module time real 13.0.1
On the cRIO, I'm under Labview RealTime 12.0.1
I installed SP1 2012 Labview real-time Module on the host computer and tried 12.0.0.
Then, I received this message:
"Remote Server for Labview RT 13.5.0 requires Appweb 13.5.0
Engine for Services execution Web 13.5.0 requires NEITHER System Web Server 13.5.0
LabVIEW Real-time 12.0.1 requires the service locator 1.0 ".
I searched the forum with no luck
Any help I appreciated.
BR
Arne M
Hello
I solved the problem.
Just had to select the correct versions of all additional software necessary
Support remote Configuration OR system 5.6.0 etc..
-
Hello
I have a compact rio, which has a 4 way frame this chassis is the three modules of ni9234, they are related using FPGAs for application in real time, then using shared variables in the low-speed loop associated with a slave modbus to communicate with the domain controllers, the nor 9234 accelerometers linked to them with option ac coupled iepe on c modules , my problem is the real-time application seems to work well even when power loss occurs it restarts without problem and the fpga written hard disk portable bin files very well, but without an accelerometer connected I get readings of low noise as soon as I connect an accelerometer to one of the outputs 10 it just goes to a fixed number (0.03125) as soon as you unplug it again He returned to readout noise, I ran a scan on the modules and get only a spike when I connect or disconnect the accelerometer, I tested voltage at the pins on the module and I get 22 volts CC which makes it more likely that the material is not the problem, but software is perhaps the cause to hang up, I join the project and files for your perusal. I also realized a new project which, in mode directly linked scan has the module entry in the shared variable and the scenerio even once again. Help would be appretiated.
Thank you very much
Jason
Whren using waveform with the 9234 acquisition, we recommend the following FPGA and RT model.
http://sine.NI.com/NIPs/CDs/view/p/lang/en/NID/209114
It can be extended as a datalogger with:
http://zone.NI.com/DevZone/CDA/EPD/p/ID/6388
or using shared variables combined with the analytical engine
http://zone.NI.com/DevZone/CDA/tut/p/ID/9851
The FPGA in all this, as well as the framework of RT have used successfully by 1000s of users. I recommend giving these a try.
-
Deployment of local variables shared on a real-time target
Hello everyone, once again
I read more posts and knowledge base articles about this topic than I can count at this point, and I'm scared, I'm still not clear on exactly how it works, and I hope that someone can delete it for me, if it is to earn themselves some laurels more.

I have a project with a real-time quote and the other Windows. They shared communication via network-published variables. The real-time part also uses shared single process variables to communicate between the loops. I have the intention of all 3 libraries of shared variables (Windows-> RT, RT-> Windows and RT Local) to be hosted on RT target for reliability. Real-time executable must start at startup and run even if side Windows is not started (on the side of Windows is optional).
I realized that real-time executable will not start the variable engine shared and/or deploy itself shared variables. I also read that I can't deploy the shared variables programmatically from the side of RT. This leaves only two options that I know of:
(1) their deployment programmatically in Windows-side program.
(2) deploying the shared variables on the target RT manually via the project in the LabVIEW development environment, and
About option 1, as I said running Windows is supposed to be optional, so you have to run a program on the Windows side before the side RT will work is highly undesirable. Moreover, even if I do a little "Deploy shared variable" application that runs at Windows startup, I can't guarantee that it will work before start of the side RT executable will run. In this case, the executable file RT will fail due to not having the variable engine shared running? If so, and side Windows, and then starts the engine / deploys the shared variables, the side RT begins to work automatically? If not, is it possible to trigger this restart of the Windows startup application side?
Also, I just read everything and tried the option to build to deploy variables shared in the application of the side Windows. Not only that my RT shared Local Library variables not listed as an option (given that the application of the side Windows does refer to it in all for obvious reasons), but when it deployed two other libraries at startup, the program side of RT (which was running in the development environment) stopped. I'm not positive that would happen even if he was running like a real executable file, but it is certainly enough to make me nervous. I assumed that the library is not listed may be resolved by including a variable network-a published in the local library of RT and including the app side Windows.
About option 2, I don't understand how I'm supposed to deploy my libraries shared variables without stopping the execution of the startup on the target real-time application. Once I did, the only way to restart the application of the RT is to restart the computer RT, correct? In this case, I just undid all the interest to deploy the shared variable libraries? Unless libraries remain deployed and variable motor shared running even after restarting the computer of RT, which would solve the problem I guess. Certainly, I would like to know if this is the case.
However, option 2 is complicated by the fact that when I manually right-click on any of my shared variables libraries and select "Deploy" or 'Deploy all', libraries still do not appear in the Manager of the distributed systems, even after clicking Refresh several times, on the local system or the target system. The only thing that shows up, on both sides, is the Group of 'System', with FieldPoint, etc. in it. The same is true when I run my application in real-time in the development environment, even if the shared variables are clearly working, as I mentioned earlier.
So, if you have done so far through this mammoth post, thanks! I have three main questions:
(1) are that all my descriptions above correct in what concerns the variables how work sharing?
(2) what is the best way to meet the requirements I have described above for my project?
(3) why shared variables libraries not appearing in my manager of distributed systems?
Thanks for any help you can give on any of these three questions!
-Joe
1. Yes, as soon as you deploy the project the NSV is tranactional. EVS is loaded by MAX when you configure the RT target and begin to operate as part of the boot sequence.
2. you can see anything on your target rt in the DSM?
3. Yes, NSV and EVS are persistent resets.
-
UDP playback does not work on a real-time target
Hello
I am running LabVIEW RT 8.6.1 on a PXI 8106 RT controller. LabWindows/CVI for RT 9.0.0 execution engine is also installed that I develop using LabWindows/CVI 9.0. I'm trying to send some data UDP for an external PC via the network for software running on the controller, but this does not work. The UDP packets are certainly get sent (I receive on my PC when the transmitter to reconfigure my PC IP address) but the UDP callback function is not called. The call to CreateUDPChannelConfig returns OK. Here's the (very simple) code that I wrote based on the example of reading NI UDP:
#include
#include #include // Global variables static int reader_channel = 0; // Global functions int CVICALLBACK UDPCallback (unsigned channel, int eventType, int errCode, void *callbackData); /// HIFN The main entry-point function for the Real-Time DLL. void CVIFUNC_C RTmain (void) { int errno; if (InitCVIRTE (0, 0, 0) == 0) return; /* out of memory */ // Create UDP receive task errno = CreateUDPChannelConfig(49152, UDP_ANY_ADDRESS, 0, UDPCallback, NULL, &reader_channel); while (!RTIsShuttingDown ()) { SleepUS (1000); } CloseCVIRTE (); } int CVICALLBACK UDPCallback (unsigned channel, int eventType, int errCode, void *callbackData) { static int udp_received = 0, default_rx = 0; switch (eventType) { case UDP_DATAREADY: udp_received++; break; default: default_rx++; break; } return 1; } All that happens is that software is just waiting for the callback to be called (which never does). I found this ad that described a similar problem, but the developer was using LabVIEW and although he has found a way round the problem, he was never heard as to why it worked.
Thank you
Martin
Hey,.
Although the problem is now resolved, I thought that put the code for others see if the same error is encountered. The modified code is tested and works. It is saved as an attached png file.
-
Shared on a real-time target Variables defined causes the command to remotely fail
Here's a strange. We create a solution of customer using a CompactRIO, and they want remote panels can view and interact with the executable file. That's fine, we are able to create this, but we noticed a thing is:
If we build and deploy our code in real-time for CompactRIO with all shared Variables associated with a type definition, the executable will not run. Indeed, it is reported by the browser as a broken VI remote Panel utility.
Breaking the shared link Variable with the type-def and rebuild the executable file, solves the problem. Weird.
Anyone else seen this before?
Hello Thoric,
I think I spotted a CAR already assigned to it:
http://www.NI.com/white-paper/13235/en
#292012
Looking at our notes this should be fixed in the next version.
-
How to create the shared library for linux real-time target in labVIEW Windows?
I use myRIO running linux in real time. In my project, I need to pack some C code, so I tried the node library function call.
I know that I should use the tools compile cross - compile linux on Eclipse to compile c code in linux .so library. But the problem is that call library function node does not recognize the .so file because my labVIEW runs on a Windows PC.
What should I do to fix and how to combine C code with labVIEW during programming for devices shipped as myRIO?
Basically, you must also create a Windows DLL that exports the same functions. These functions can be empty stubs if you do not want to run the code correctly on Windows, otherwise you will need to consider how to implement the equivalent functionality on the Windows API.
Then you can write in your node library call as the name of the library "
. "*" and the name of the shared library Windows " .dll" while the Linux version is called "name of your library > .so". LabVIEW will replace the * after the comma in the name of library with everything that is the preferred extension shared library for the platform it is running on and therefore load the right shared library. Alternatively you can wrap call all the nodes of the library in a structure that contains the node library in the case of Linux RT and all what you want to run on other platforms in the case of default or a case of specific platform, call the conditional compilation.
-
A pump for connections rs232 for real-time control
I have a genius pump more syringe (manual attached) and I need to be able to control the flow of the pump in real time of the computer, using a dial to to the top or the bottom rate as I see climb. I used the basic series vi in read/write of the examples just mentioned another detachment and he contacted the unit very well using the commands contained in the manual. My question is how I change this option or what do I have to do the program I need? I'm barely a beginner still labview but tells me it can be a very useful program for this and other future applications that I will meet you. all the advice, it's that very much appreciated, thank you!
-
Defender pro 5-in-1 is unable to run, because the real-time protection is disabled
I installed Defender pro 5 in 1, it won't work. He said: real-time protection is disabled. don't know how to turn it on
Never heard of Defender Pro 5 in 1 until now.
Suggest you contact Defender Pro 5-in-1: http://www.defender-pro.com/support/
-
Unable to connect to the Network Time Capsule wireless
I just changed ISP (AT & T to Time Warner) and I use my own modem cable (Arris SB6141). I connected by TC via the WAN and knitting laptop via the connection to the local network, but now only my MacBook Air (El Capitan running) connects to the wifi network of TC. Nothing else connects; AppleTV (w/Siri), iPhone 6s (9.3.1). Is there a compatibility issue that could be the cause of the problem between the modem and the TC? Or is there something I'm supposed to change with the settings? It worked fine when I was using a router 2WIRE AT & T U-Verse.
Looks like the router Mode of the time Capsule airport is set to Off (Bridge Mode)... (which would have been correct for use with a 2Wire product)... but, it must be set to DHCP and NAT to use with a simple modem.
Turn off the modem for at least 20 minutes... more won't hurt
Turning off time Capsule
Make sure the Ethernet cable from the modem connects to the "O" on the Time Capsule WAN port
After the 20 + minute modem switch off period has finished, turn on the modem and let it run for 10 minutes
Then, turn the time Capsule and let it run for 5 minutes
On your MacBook Air...
Open AirPort Utility... (Finder > Applications > utilities > AirPort Utility)
Click on the image of the time Capsule
Click on edit in the window that appears
Click on the network at the top of the next window tab
Make sure that the setting of router Mode = DHCP and NAT
Click Update at the bottom right of the window and give the time Capsule a minute full to restart
Recheck the network and report on your results
Unfortunately, the SB6141 and Apple routers not always who hear well together, so keep an eye on the issues
-
blocking of the real-time target PC
Hello
I'm setting up a desktop as a RT for Labview 8.6.1 PC. I created the USB boot disk and formatted the hard drive in FAT32. USB startup disk was created with Labview Utility version 8.6. The bootloader of Labview RT and PC installed USB target RT detected network card. However, when booting, the computer crashes right after that and I could not do something else like changing IP address or install the OS of the RT.
The RT - PC is a Dell Precision T3400 with Intel Pro 1000GT NIC host PC firewall was disabled, he and the target RT is connected to a Belkin router. Also I don't know if I have to use a switch or a hub to the host to detect the target RT? I have attached a screenshot here. Any help is greatly appreciated.
Thank you
Max
I solved the problem. It was because of the Flash card reader. I unplugged and the machine can now be detected in MAX.
Max
Maybe you are looking for
-
Yellowing of the feeder on the Organization tab
Hello discussions of Macbook Pro,. I recently went to the Apple Store for other reasons, but I mentioned it to the person I was talking to the one under the Organization tab I had kept in the same place for a long time the power cord has become yello
-
Satellite Pro L870-18R - no boot after upgrade CPU
Hello Bought the "SATELLITE PRO L870-18R" alongside a "Intel Core i7-3740QM 2.70 GHz FCPGA988 L3 6 MB 4 Cores CPU 2.70 GHz" to upgrade the processor and get a beautiful machine. Boots of machine as expected with its stock i3, but white LED will blink
-
Kodak printer leave scanning and copying - only a few months - then tried to reinstall my Canon printer - computer writes that both printers were NOT connected even if all have been connected and printer lighthouse was lit. On top of that error code
-
Catch the inevitable back with Javascript
Is it possible to catch the back key pressed event? I found the link by using the Widget API, would continue to operate the javascript even when I'm not using this api? My pure html code & javascript, is there another way to do it?
-
I have a problem with Kaspersky Security System.
I have Windows 7 countertop and use Kaspersky PURE 3.0 for the last 4 years. Last week, it was corrupted. I'm having a HUGE problem with society which, for some reason, do not want to give me a help to help solve my problem. I uninstalled the prog