Robotics
Salvation;
I need to create a labview for MINDSTORM NXT program; robot is supposed to detect obstacles and he must be aware of the color of the ball (blue or red) and towards the head and type up to the point of GOL;
We begin by using the engine then via bluetooth;
Thank you for your answer
There is a forum dedicated specifically to the NXT http://forums.ni.com/t5/LabVIEW-for-LEGO-MINDSTORMS-and/bd-p/460
Tags: NI Software
Similar Questions
-
Construction of a simulation - Labview Robotics
My main points:
1. is it possible to generate an XML (like the one used for robotics simulation environments) using labview?
2. If so, it would be possible to then update this map dynamically with the data from the sensor (so if we find a wall we add it to the simulation where we believe it is)?
3. in the case, is there a low-no budget program that could create a card with the data that is also compatible with labview. (little a long ball, I realize)
I have alternatives, but this seems to be the most visually impressive. I would be grateful of any shed light on the subject.
Hello
LabVIEW Robotics module simplifies many things with regard to the implementation of your environments and projects designed by owner. To create an XML file from your own custom Setup program, you can use the LabVIEW Project Assistant start-up as described in Chapter 5 of this paper:http://www.ni.com/white-paper/14133/en/
You can update the environment dynamically without needing to edit XMLs as dedicated property nodes have received almost all the necessary options for the majority of applications. If you do not need to modify the XML code, it is possible to do either with the XMLSchema direct string manipulation toolkit (as xml files are simple markup text files). That being said, the manifest file is usually loaded before the main loop in the simulations of Robotics that did not trigger a dynamic update on the environment.
-
I recently started work on DaNI 1.0 Act LabView Robotics Hands-it is available in the Robotics 101 Resource Kit.
I'm stuck at step 11 of exercise 2: Introduction to the LabView environment development.
It says select Bitfile and navigate to this path. Can I'm lost and I was wondering how to get there.
Any help would be greatly appreciated.
Hi Ali,
I'm sorry for the No.
My problem is: I can't find the bitfile in my as project file.
After a lot of research (I did a complete search of the C:\ drive), I found an identical to the bitfile bitfile said in the tutorial.
I find the bitfile in this way:
Discovering Instruments > LabVIEW2010 > examples > Robotics > Starter Kit > Starter Kit roaming > FPGA Bitfiles > StarterKitRoamin_FPGATarget_StarterKitFPGAVI_E8A41200.lvbitx.
I'm using LabVIEW Robotics 2011 Module.
-
Executive differential Robotics
Hello
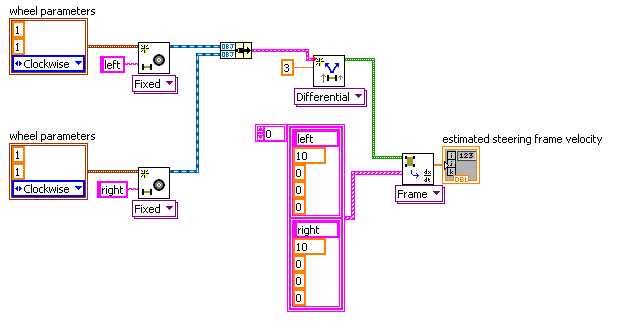
I am an autonomous robot using LabView programming and I'm having a little trouble with the vi «Get the speed of frame of steering wheels»
I narrowed down it to this simple test, which makes a differential direction image, pass a few tests of wheel speeds and reads the estimated speed of weft direction.
As the wheel past the speeds are identical and in the same sense, I suppose that management believes frame speed would be all right (y_dot) with no angular velocity (theta_dot), but the values returned for [x_dot, y_dot, theta_dot] are [0, 4.59618, 8.10573]
Here's what the test looks like.
I have sucessfully used the other direction and communication engine screws without problem.
Any help would be greatly appreciated.
Pierrel,.
I made a change in the direction Robotics API which should solve the problem you are experiencing. Please try these steps, and then let me know if it fixes the problem you see:
- Unzip the contents of the attached zip file into your ""
\National Instruments\ "folder. " - Verify that this file exists: '
\National Instruments\LabVIEW 2010\vi.lib\robotics\Steering\Steering Frame\Estimate speed Transforms.vi ' - Test your application on the desktop and RT. 'Get Steering Frame speed of Wheels.vi' should now return the correct values on the two types of targets.
Chris M
- Unzip the contents of the attached zip file into your ""
-
The rangefinder display in the Robotics Toolbox can be used in normal LV?
I assume that the rangefinder and other displays of nav are imagine xcontrols based on the image control, it should be possible if the License Manager allows.
As long as build the exe from a development environment which has licensed robotics, the integrated executable should work properly.
-
Unable to connect to starter kit 2.0 Robotics
Hi all
I know this question has been askedmultiple times, and I read trough forum messages, but cannot find a solution.
When I try to run a robotics project on DaNI, 2.0 Starter kit, I get a message of conflict resolution, saying "unable to connect to the target. --> See image rasthaus
I installed the latest version of labview, robotics, FPGA modules and in real time as well as pilots of RIO.
Once I disabled my firewall, I was able to detect the robot with MAX, but I was not even able to connect using labview.
Thanks for any help,
MortZxD
Hello
I had the same IP address as illustrated by MAX in my library of projects, but I could not always connect.
I reset the IP address of the robot to start in safe mode and changing an address IP static, dynamic and who did the tour!

Thnks
-
Hello
I have Robotics starter kit 1.0 and Labview 2012. I would use custimizing FPGA, which does not directly use the starter kit of screws. I haven´t have been able to find an example of this for the starter kit 1.0 and I don't ' want to start from scratch.
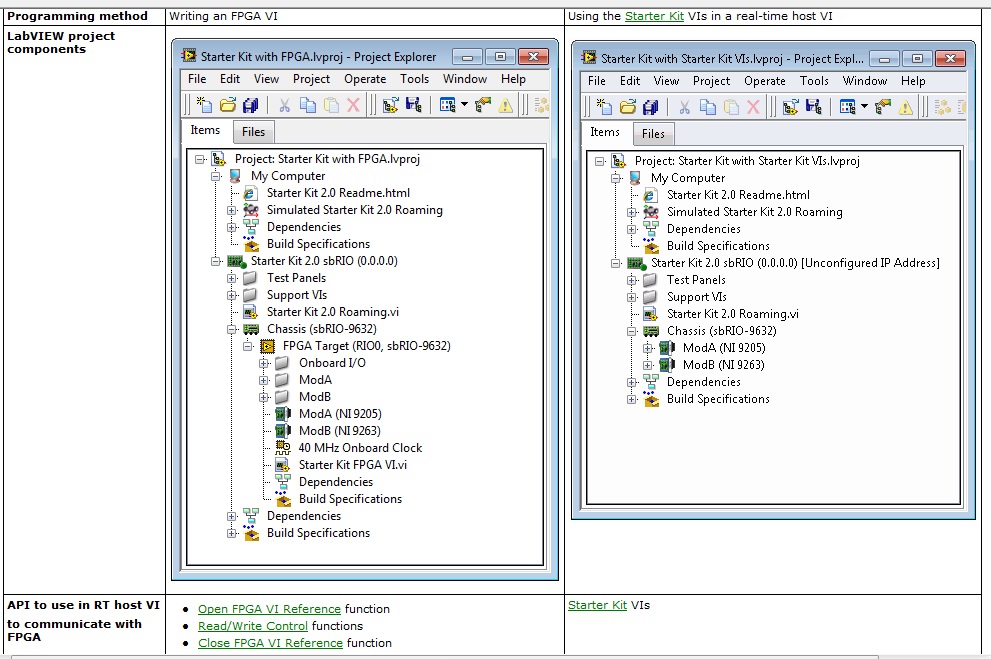
To clarify my question, I would like to work in an environment similar to the one on the left, instead of one that is indicated on the right but for the starter kit 1.0
So my question is, where can find an example of the itinerant program for the starter kit 1.0, with an FPGA vi?
Thank you
Juan
Certainly, as it is said "jordankuehn", what you see on the left of the image is a project, which added a FPGA target (right-click on the chassis > New > target FPGA), which allows to work in FPGA environment and not mode SCAN Engine (illustration right). Now unfortunately the 2012 version of LabVIEW and LabVIEW Robotics Module 2012 does NOT include an example to customize the work with the Starter Kit 1.0, unlike an example of work with the Starter Kit 2.0.
You could do the following: the version of LabVIEW 2010, if it had an example in order to customize the features of the Starter Kit 1.0, then you can install the 2010 version of LabVIEW and LabVIEW Robotics and get this example. Or you can see the attachment that is an example, I used to work with the Starter Kit 1.0 in 2012 of LabVIEW.
-
OR Robotics with camera IP D-Link for Tennis Ball Tracker
Hello
I am applying the example mentioned above using the D-Link IP camera.
I contacted the supplier of the axis in my area, he said, he needs 4 to 8 weeks to be delivered.
My summer program ends July 4, 2012.
That's why I searched in my area and bought a D-Link IP camera.
I need to know the difference
will it work?
How do you have power to your Axis M1011 IP camera, while it is mounted on the KIT OR-Robotics?
How can I access the camera from D-Link your VI "ball of Tennis?
Thanks in advance.
Your quick response will be very much appreciated.
Ihab
-
Robotics module vs «Tools for code import existing C/c++»
Hello
The descritption of LabVIEW Robotics Module has this line:
"Tools for importing existing code in C/C++ and VHDL.
Is this something new in the Toolbox, or is - this referring to the standard function available in the basic package?
I wasn't able to find special functions in the Robotics module. I missed something?
http://sine.NI.com/NIPs/CDs/view/p/lang/en/NID/209856#productlisting
Hello Andy,
As you said, import of existing C/C++ code is originally from LabVIEW, while VHDL is enabled via the LabVIEW FPGA module.
I checked with a few colleagues and it seems that this statement in the overview is just there to remind that the integration of the text based code should be simple and intuitive with our framework. I don't think there are new features in the Robotics module that will expand the capabilities.
-Daniel
-
Hello
I am trying to simulate a youBot on an envirment just walk right to the difficulty red cell using Robotics Simulation environment. However, there is a problem: it seems comfuse VI 'Set up Steering Frame' with four engines on the youBot engine.
I really want the robot to go straight.
My goal of ultimacy is to implement the plannig of path to the robot.
Could you give me some advice on this?
The project file has been compressed and downloaded.
Thank you very much
It seems to me that similar issues have been postponed and responses on these Forums. Did you do a search in the Forums? Have you looked in the Forum of Robotics?
Bob Schor
-
How can I use the Module Robotics compass indicator?
I need to use the Module Robotics compass indicator.
I would like to know how to pass a value to him? What is the scope?
Thanks in advance
Guilherme
It is a digital indicator, where the entrance is in degrees. 0 degrees is North, 90 is East, 180-South, etc.
-
Connection to Microsoft Robotics Simulator
Hello world
I tried to connect labview and Microsoft Robotics simulator based on this link: http://decibel.ni.com/content/docs/DOC-9214
everything's fine until when I run the SimluatedNIcholas.vi I plead for a microsoft.dss.enviroment.dll I can't find it anywhere. Someone has an idea or the same problem some time?
Thank you
Trin Hello,
Did you run the SetupPlugin.VI before running the example? This plac MSRS VI and save the NIcholas VI simulated with path to the correct link.
-
How can you uninstall Microsoft Robotics Studio.
I installed Microsoft Robotics Studio for a SAM project and now I need to uninstall it, but I can't find it to uninstall programs on XP. I see only a series of programs that I instaled never what programs should I remove to comepletely uninstall Robotics Studio?
Hello
I suggest you to refer to these links and check if it helps:
http://support.Microsoft.com/kb/307895http://support.Microsoft.com/kb/314481
It will be useful.
-
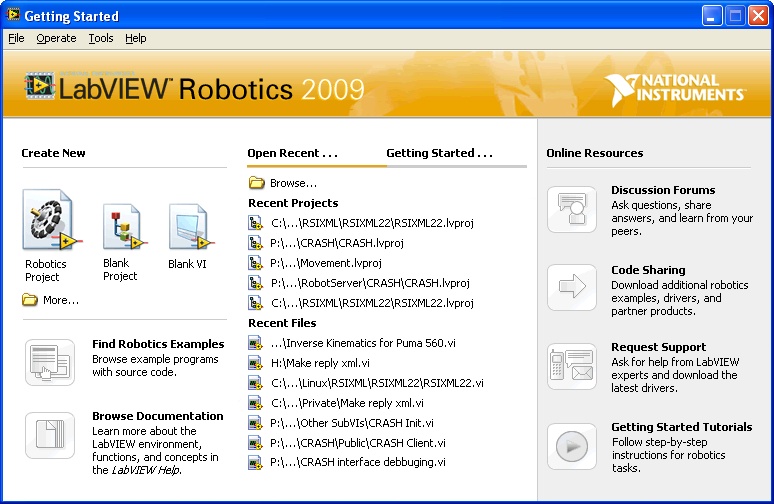
I installed the Labview Robotics module for evaluation, but when I start now Labview I meet the following start screen:
How to bring back the Labview standard splash screen?
Terje,
When LabVIEW Robotics is installed, it replaces the file LabVIEW get a window on the way. You can return to the standard window began to to repairing the installation of LabVIEW:
- Go to add/remove programs from the control panel.
- National Instruments -click and select Change/Remove.
- Choosing to fix LabVIEW.
- Insert the LabVIEW Setup disk if you have an or navigate to the network location that you used to install LabVIEW.
- After you have repaired LabVIEW, you should be able to restart with the default value getting started window restored.
-
VI FPGA is broken in example Robotics Starter Kit is copied.
I use LV 2010 and I play with the example of 'Roaming' Robotics Starter Kit. When I open the Starter Kit project directly from the Finder "example" and look at the FPGA code, everything is fine. However, when I do my own copy of the project (by performing a save under, select duplicate .lvproj and content), there is a problem with the FPGA code. If I open 'Starter Kit FPGA VI.vi' I get a broken arrow. Some FPGA IO references seem to not completely defined. Screenshot see attachment. I also note that the reference to the wick of FPGA (in Roaming.vi) always points to the original location of the bitfile in LabVIEW 2010/examples, rather than follow the new copy of the project. Can someone tell me why this is happening and how to fix it so that I can edit / rebuild the FPGA image. Note: I also installed LV2009, and I'm sure that I was able to do this in the past.
Problem solved... sort of.
Don't know why save it under did not work, but it seems that the 'Correct' to get a working copy of the Starter Kit "Mount" app is to use the new option 'Project Probotics' of the screen to start LV.
This is made most obvious from the portal "LabVIEW 2010 Robotics", but it is also available from the portal "LabVIEW 2010"standard if you dig into the choice of 'New project'.
PS: 'Portal' is probably not the right word, but I don't know what to call different 'flavors' of LabVIEW.
Phil.
-
I can't install my US Robotics modem, because there only drivers under VISTA 32 bit. My current operating system is 64-bit.
Is there an easy way to change my 32-bit system in order to install and use this modem/fax?
Hello
You cannot change your system of 64-bit to 32-bit
they are completely different operating systems
You must purchase the 32 bit OS and do a clean install of it
Contact support with their product, USRobotics
they write drivers for their products, not from microsoft

Maybe you are looking for
-
Your cell parameters are defective?
I got my off cellular data for Netflix access so do not incur data charges accidentally. After watching a full episode, I know I'm on data while watchig. While they inspected the settings, it was always off. Is there a bug in your programming? How am
-
Lost the STOP button with upgrade for FF9
I can not get the STOP button on the Navigation toolbar since I upgraded to FF9. Where at - it go?
-
I use FInal Cut Pro 7-Yosemite OSX and I get this message when I try to play through cross dissolves. It was working fine and then my canvas turned black. After you verify that it was set to picture and RGB, I trashed preferences and now I have a new
-
ANALYSIS OF the CHAIN fails with empty quoted strings
I'm scanning a long text with the STRING SCAN line. "[My problem in the first place of this part: " [^] "]" The string I'm scanning a quotes in it - I want to extract the string in quotes as a single item. I can't use %s because the string can have s
-
Explorer.exe crashing constantly
I recently ghost a laptop (Dell E-6530) with Win7 x 64 and installed all the drivers that I could find at Dell. I used a ghost of a different model Dell laptop image but everything seems to work fine except that explorer.exe is constantly crashing. S