Systems of linear equations
Hello
Does anyone know if there is such AS classes or functions to solve systems of linear equations? On the form A * x = c. A is a square matrix, x is a vector of unknown, and c are constants.
In other words, a system of equations with a number of well-known (1-5) and an equal number of equations.
Here is an implementation of the elimination, Gaussian, that you can use. There is no error checking included:
package com.kglad {}
public class Gaussian_Elimination {}
public void solveF(a:Array):Array {}
for (var pivotCol:int = 0; pivotCol<>
a = pivotF(a,pivotCol);
var factor: number;
for (var row: int = pivotCol + 1; row)<>
factor = a [row] [pivotCol];
for (var _col:int = pivotCol; _col)<>
a = [line] [_col] has [pivotCol] [_col] * factor;
}
}
}
Return echelonF (a);
}
private void pivotF(a:Array,pivotCol:int):Array {}
var maxAbs:Number = 0;
var maxRow:int;
for (var row: int = 0; line)<>
{if (Math.ABS (a [Row] [pivotCol]) > maxAbs)}
maxRow = row.
maxAbs = Math.abs (a [row] [pivotCol])
}
}
pivotCol line swap with maxRow
var tempA:Array = a [pivotCol];
normalize the maxRow
var number: max = a [maxRow] [pivotCol];
for (var i: int = 0; i<>
a [maxRow] [i] / = max;
}
[pivotCol] = a [maxRow];
a [maxRow] = tempA;
return a;
}
private void echelonF(a:Array):Array {}
var years: Array = [];
var last: int = a [0] .length-1;
for (var row: int = 0; line)<>
var term: Number = 0;
for (var num:int = 0; num<>
duration = [line] [last-num-1] * and [num];
}
end += [line] [last];
ans.push(Term/a[Row][Last-Row-1]);
}
Return ans.reverse ();
}
}
}
Tags: Adobe Animate
Similar Questions
-
FIRST HP: Solving a system of linear equations with a parameter
Hello
I know how to solve a system of linear equations by using a setting by hand but I don't know how to set up in the calculator.
Can someone please help me solve the system of linear equations below with a 'p' on the first HP Calculator next parameter?
2 x + 8z = 26
4 x-4y-14z = - 38
8 x - 4y + 2z = 14
The answer to the above equations is:
x = 13 - 4, =(45-15p)/2, z = p y p
Thank you
Arthur
Hello
What you're trying to solve is not really a system of equation with a parameter, but you try to solve a set of 2 equations with 2 variables (x and y).
The case solve command can do for you.
According to the CASE, type:
Solve ([(2*x+8*z) = 26,(4*x-4*y-14*z) = - 38,(8*x-4*y+2*z) = 14], [x, y])
Come in
and the calculator will return
{[-4 * z + 13, 15/2 * z + 45/2]}
which is what you want.
Cyrille
-
HP 40GS systems of linear equation with parameters
Hello
I'm in the learning curve of the HP 40GS - a very interesting tool.
Is it possible to solve systems of equations with parameters, for example:
A * X + Y = 2 * 12
5 * X - 3 * A * Y = 5
HP 50 g, this isn't a big deal, but with HP 40GS I don't have an idea so far.
If this is not possible, it will be possible if I have a third equation (so 3 equations in 3 unknowns)?
Thank you very much in advance,
Joachim
P.S.: So far, I feel very comfortable with the HP 40GS and menus!
----------------------------------------
I am not a member of the HP Calculator development team - unfortunately!Hello
now, I found a way to calculate the systems of equations with symbolic coefficients:
See the document: http://www.hp.com/ctg/Manual/c00829737.pdf to page 346ff
With the command 'linsolve', it is possible to calculate with more unknown than equations.
I hope this helps anyone with the same or close problem.
Have fun with your calculators and do not hesitate to write other ways of calculations.
Greetings,
Joachim
-
non-linear system Solver more equations than unknowns
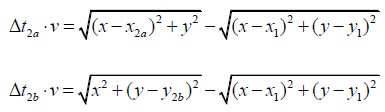
Is it possible to solve a nonlinear system with more equations than unknowns in LabView. I do a triangulation and data from several sensors, so I'm able to write 6 equations in order to get the 3 coordinates (x, y, z) as a solution. In LabView, I was able only to solve a system of 3 equations with this 3 unknowns, but I would use the set of 6 equations in order to obtain a more accurate solution, given that some measures can be noisy.
Thanks in advance
You can use the non-linear curve code to solve this problem. Consider the following system:
3XY + y - z = 12
yx + x ^ 2 + z = 12
x - y - z = - 2
Arrange to get 0 right side. x, y and z are the paramneters to be in shape. The entrance to the curved Fti.vi Y non linear will be an array of three zeros. Initial settings will be an array of three values, for example [1 1 1]. An example is attached.
-Jim
-
Solve linear equations - Block tridiagonal matrix
Hello
I developed a vi that can be used to solve tridiagonal systems by block of equations by Thomas algorithm. These systems are usually in the finite differences method used to solve equations in partial derivatives.
For iterations of 1000 times, its time is ~ 500ms. Now, I want to finish the work within 100ms. is possible to improve the performance?
Thanks, Jong Hyun
For details of the Thomas algorithm, please see wikipedia Web page, http://en.wikipedia.org/wiki/Thomas_algorithm. Note that it describes how to solve tridiagonal linear equations, but same logic can be applied to block tridiagonal equations.
* If you use the vi sparse SLE of analysis multi-hearts and Sparse Matrix Toolkit, the elapsed time is 450 ms ~
LabVIEW basic/full/pro all use Intel MKL library for linear algebra on MS Windows and Linux. Intel MKL designed to be very fast for large matrices and breaking a problem given out to take advantage of the different levels of cache. Linear algebra calls go through several levels of functions, including size controls, if any, and may allocate memory for the workspace each call, before finally calculate the result. This overload problem is evident when the matrix is so small (3 x 3).
I coded matrix-matrix, versions multiply, matrix-vector multiply, and matrix opposite in the case of 3 x 3 explicitly in soil using the structure in place and full indexation (no loops, all scalar operations). This eliminates the overhead of controls and allows better and placeness. This brings your reference point down for ~ 70ms on my machine. Unfortunately this requires significant code changes if you change the block size, but it provides good performance.
"I think that, if I can save each submatrix conversely in the first round and use several times, then speed will be better."
I agree. You should be able to calculate the most sweeping toward the front of the algorithm and simply replace the submatrices changed and still solve before. This may mean re - organize the variables to have the submatrices updated or modified down to the right of the input matrix.
-Jim
-
Hello
Is there a way to solve non-linear equations and find x and y of them using LabVIEW MathScript and MatLAB (do not have those on the PC lab)?
Maybe someone has an example...
Thank you.
When I ran your VI, I got error-23023. When I go explain that error and I get ill start dimension. Error-23001 is a syntax error. In your second equation you sqrt (x ^ 2 - y ^ 2) while the equation in your initial post was a +, not a-. Gives me a syntax error, but nonetheless find a zero.
The reason for the error-23023 is that you have specified the start but not end. create a control for end and enter two values immediately find a zero to 1518.178612...
Here is the VI I've used. You may need to recreate a link to the reference to the function VI because it will be in a different location.
Lynn
-
Resolution of a system of nonlinear equations
Hey guys,.
Currently, I am trying to solve a set of nonlinear equations in LabView with the help of MathScript and MATLAB code. I am trying to create a code of work for hours, but I have not yet reached this goal.System of equations:
x ^ 2 + y ^ 2 + z ^ 2 - R1 ^ 2 == 0
x ^ 2 + (y - Y0) ^ 2 + z ^ 2 - R2 ^ 2 == 0
(x X_0) ^ 2 + y ^ 2 + z ^ 2 - R3 ^ 2 == 0R1, R2, R3, X 0, Y0 are known.
A possible solution in MATLAB (assuming that X 0 = Y0 = 100, R1 ^ 2 = R3 ^ 2 = 11000, R2 ^ 2 = 9000):
Create myfun.m with the contents:
function F = myfun (x);
F = [x (1) ^ 2 + (2) x ^ 2 + x (3) ^ 2-11000;]
x (1) ^ 2 + (x 2-100) ^ 2 + (3) x ^ 2-9000;
(x 1-100) ^ 2 + x (2) ^ 2 + (3) x ^ 2-11000];
endThe initial value for iteration:
x 0 = [50 50 50]FIX:
fsolve (@myfun, x 0)=> Works great!
Now, I tried all these stuff plug a MathScript node:
function F = myfun (x);
F = [x (1) ^ 2 + (2) x ^ 2 + x (3) ^ 2-11000;]
x (1) ^ 2 + (x 2-100) ^ 2 + (3) x ^ 2-9000;
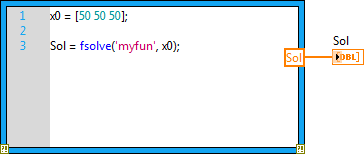
(x 1-100) ^ 2 + x (2) ^ 2 + (3) x ^ 2-11000];x 0 = [50 50 50];
Ground = fsolve (@myfun, x 0);
This is where the problem begins.
When I try to run the program, I get the following error message:
A function is defined in the present text. You must save and call
function with input values appropriate to run the function.I can't really understand, what I did wrong and I would be very grateful if someone could help me.
Kind regards
fuchristHello
MathScript does not support inline function defined by the user (UDF). What you need to do is
- Define the UDF in a ".m" file. Give this file the same name as your UDF ".m".
- Save the file ".m" MathScript search path. By default, the search path is the LabVIEW data folder.
- Pass the name of the file ".m" as the first string input to the fsolve function in the MathScript node.
I enclose my .m file and snapshot of the MathScript node. The result I got is [50, 60, 70] which must be correct.
-
System of differential equations to solve a model of BZ reaction
Hello
I wrote this little code to visualize the oscillation of the BZ reaction. I expect to see the oscillation as in page 3 and 7 of the link below
http://home2.fvcc.edu/~dhicketh/DiffEqns/spring2014projects/SilasSchwarz/final/final/bzreaction.PDF
This work is done in Matlab, and I want to reproduce in Labview with the same settings. But so far I could not see the oscillation.
Could someone body spot what is wrong with this code?
See you soon,.
Zied
I have noticed that but not had time yesterday to examine it. I've implemented their matlab scripts and it turns out that the constants they give; e, e' and q are in fact 10 ^-n, and not 10 ^ n. A typo in a student newspaper, how rare
 once I changed that I had the correct plot as shown here:
once I changed that I had the correct plot as shown here:
Attached to the VI. It runs much more slowly than in Matlab, so be warned.
-
Solve this linear system HP50g
Hi guys,.
I am an engineer in electrical engineering and have to solve systems of linear equations on a regular basis, so that the functionality is very important for me. Everything works very well, 95% of the time but sometimes I meet systems that the HP50g doesn't seem to like. For example one below.
I want to solve for x, y, z and one in terms of V
V- 100000 x +is-100000 100000x= 0
-250000is-V+ 100000x100000z= 0
-250000z+ 100000one+ 100000y= 0
a+ 100000-250000z= 0
After these 4 equations is on the stack, I'm them in a vector by pushing {4} in the stack and then by pressing -> ARRY. Then I push the variables I want to solve for the battery, x, y, z and a and a vector of them. Then, I use LINSOLV to solve the system. However, when I do it this way, the calculator gives me an equation for x, an equation for y and 2 equations for z and no equation for s. I'm not sure what I'm doing wrong. Is there another way to do that would give me 4 equations, one for each variable I want to solve for in terms of V?
If my method to solve linear equations is somehow confusing, I basically followed this video
http://www.YouTube.com/watch?v=z802L29JyQE
Thanks in advance.Hello
Do not know exactly how you typed, so I'm being explicit just for some b:
Notes:
(1) as an equation is entered, use ' '
(2) it is preferable to use a comma to separate the real and imaginary parts
(3) explicit use multiply
If the entry will look like this:
'(4,3*X) = (4.7)'
For this simple equation and assuming that X is defined as an independent variable (reproduced by 'X' in the top middle of the screen), you can use SOLVEVX for this one: (No. 5 in S.SLV menu or F5 if you use soft-keys)
with "_Approx" uncontrolled, the answer is:
X = 7/3
with "vabout" checked the answer is:
X = (2.333333333,0) (although X is part of the imaginary number, it is himself a real number).
Kind regards.
-
Calibration system as a solution of nonlinear equations
Nice day
The challenge of the day is to provide a calibration for a release of the accelerometer, expressed as a binary value.
I have an accelerometer whose operating range can be set (±2g, ±4g ±8g). The accelerometer itself then generates a binary value to 16-bit resolution. Therefore, only 2 ^ 16 value (0-65535) represents an acceleration value of which depends on the lines we have.
So we make the asumption that the response is linear, which allows us to claim:
Acceleration = scale x value binary + Offset
I have three axes of a value of data, accelerometer A, B and C. If I hold the stationary accelerometer, the only thing that I should be reading is acceleration due to gravity, g. It makes me of the relationship
(A) ^ 2 + (B) ^ 2 + (C) ^ 2 = g ^ 2
Since then, in any direction, the magnitude of the combination of all the three readings of the acceleration must be the gravitational acceleration (and that shouldn't change little matter which side you happen be pointing the accelerometer).
What gives me, then, is a non-linear relationship of 6 variables (scale factors three and three shifts). I should be able to take six measures in an arbitrary orientation that will give me six output values of each had. Then I should be able to get out the scale factors and offsets for each accelerometer, either in terms of g or with respect to which, in my opinion, g is.
So, my question is how can I get Labview to do this? I see that there is a tool to solve linear equations, but I don't see one appropriate for the non-linear case. I'm also very comfortable believing that I'm just missing it :-)
Thank you!
Since the help file detail to the nD nonlinear system Solver.vi:
Formula Variables VI analysis
The formula analysis screws accept only the following variables:

Note These same variables to specify the description of the chain of the formula for the adjustment of non-linear curve VI. a, a0,..., a9
b, b0,..., b9
.
.
.
z, z0,..., z9
For variable and function names, only lower-case letters are allowed. Screw interpret case as errors.
1. I found this by opening the Panel before the nonlinear Solver VI when executing your VI. The error information said that there was a problem with the formula.
2. I replaced the Scale__ and Offset__ variables with a0, a1, b0, b1, c0 and c1 in tables X and f (x).
3. I have expanded the values start and end - 10 and 10.
This seems to work much better. At least it runs.
Lynn
-
How to calculate the equation of dataset using 'Fitting VI' (non-linear or polynomial fit)?
I have the datasheet of a NTC (thermistor negative Coefficient) and I want to calculate the most approximate equation
that describes its behavior. The table has values of temperature and resistance. If the resistance of the NTC varies according to the temperature it detects. I tried the following:
-Excel: polynomial adjustment
-Maple: polynomial adjustment
-LabVIEW: Polynomial Fit.vi
I've been doing equations with a not very good approximate parameteres. I suspect that this method 'Polynomial FIT' it is not the best method for this type of data/equation (being a non-linear equation).
So is - that someone has used the non-linear Fit.vi matching the behavior of a dataset object? If so, can you explain how this VI... I would really appreciate it.
Thanks in advance and I will wait for your reply.
-
Hello
I have a question about Equation.vi linear solve.
Given a system of equations 8 to 9 unknowns, form: AX = Y, A is a matrix known 8 x 9 and X is a vector of 9 x 1 (unknown) and Y = 0. I would like to find space void of this equation system. We have 9 vectors columns each with 8 elements. Columns vectors are dependent lineary so there must be a linear combination of them. So I would like to find the X by solving for the 8 x 9 matrix null space.
Is the linear equation solving is capable for this purpose?
Hi D60!
If you double-click the linear solve Equation.vi and take a look on the block diagram.
You will see that, depending on the type of your matrix, functions at different riding are used. You can double-click on these features too, to see how it works.
I think that the best way to get the matrix null space is the function null of the Mathsrcipt node: http://zone.ni.com/reference/en-XX/help/373123C-01/lvtextmath/msfunc_null/
More information about the Mathscript node: http://www.ni.com/white-paper/7572/en
Please let me know if my suggestion is useful.
Best regards
-
problem of loop control and simulation
Hi all
IM undergoing a project where I created a simplified model of a Powertrain engine. In the next paragraph, I'll go through briefly how I go about it, but I'm not sure if this will help solve you the problem that I have. To be honest, that it will probably be that I understand you're all busy people.
The basic principles behind it are that RPM is an initial feed an equation which describes the torque curve. An initial couple comes from it and then using the appropriate ratio, it is multiplified, the friction losses are very roughly taken into account (currently looking for a better way to implement the friction losses, but that is besides the point...). Drag is developed using the engine rpm, converted to car speed rpm and threrefore wheel. Wheel torque is multiplied by the radius of the wheel, to find the force to the front, the drag force is then subtracted from the force before finding the net force feel of the car. This is then divided by the mass of the car to find the acceleration. The acceleration is then integrated with a systems integrator linear continues to find the speed and it is then added to the original engine rotation speed (after the relevant conversions).
So my problem is that my program hits, the engine of 8500 rpm redline in what I can only assume is milliseconds. I fiddled about with the entry node settings, but I can't seem to make it work. Even though I know that the model is pretty gross I do think that his inaccurate THAT. I have attached the VI, please excuse the bad practices, I've used, it's the first time I used this programming language. Any help will be much appreciated.
Victor
NB: the default settings of the vehicle are based on a porsche 911.
I solved the problem by synchronizing my loop with a source of synchronization. I also did the period '1'.
-
Hi all
I'm doing a double reciprocal trace (Lopez Burk) for a study of the enzymatic activity. I've seen the plot on Excel but am not able to find
a similar solution in number. I tried to use the forecast function and also tried to get my bar tend to reach an estimate of values in my columns
in the negative numbers. No chance for many. How can I get the trendline to cross the y-axis? I don't know the technical steps to create a diagram.
I use numbers 3.6.1. and have a MacBook Pro from 2012.
Thanks for your help.
Kind regards
Jonelle

Maybe this will help you?

You can map all in simple X and Y, then get the best line made with a linear equation

-
Audio distorted after upgrade to tvOS 9.1
After the upgrade to tvOS 9.1, audio is distorted. I rebooted, reset it and tried the restore as well without a bit of luck.
Surround Speaker running check indicates that the audio is sent simultaneously to all speakers (instead of individual flows from speaker).
By connecting a PS3 has also checked the TV and receiver feature.
Any ideas?
Have you tried taking the speaker system of the equation as a test case? That is connecting ATV to a different tv and tv only. This would help pin point root cause. I suggest that this is due to the widespread audio problem observed by many during the first 2 months. I would say that the majority of people have seen an improvement in audio performance with the 9.1 update. ..




Maybe you are looking for
-
I tried to simulate an example that I download sample. Example of name is Exposing_and_Tuning_HSPICE_netlist_model_parameters. But it gives me the warnings below. The application is allowed for education. Measures15:59:32 - IV_Test_original measurem
-
Black screen T400 with windows xp
a friend of mine gave me his Lenovo T400 to install Windows XP on it He previously worked fine with windows 7 and 8.1 then it starts in preinstallation of windows XP screen, it formats the hard drive and as usual instalation automatically restarts af
-
I borrowed this VI from another thread, that works perfectly for what I'm trying to do. http://forums.NI.com/T5/LabVIEW/convert-TDMS-to-LVM/TD-p/738286/page/2 What I'm trying to do is save some tension, keep it in a PDM and a file LVM (which makes th
-
HP Envy 14-1260SE: HP Envy Beats Edition 14-1260SE laptop
Does anyone know if HP updates this laptop drivers to work with Windows 10? They have the ability to select on the page of the drivers for this laptop, but there are no drivers listed.
-
Windows Security Center tells me that it is disable
Hello my windows Security Center keeps telling me that it is turn on and when I try to open it, a window keeps popping up telling me to windows Security Center cannot open my usual antivirus finds anything and also I tried to restore safe much earlie