VeriStand engine in real time
Hello
The engine in time real Veristand would give me access to the library of Veristand API using c code #/Labview?
Via Labview or c#, call the API Veristand: I am looking to open a workspace in a pre-created definition file, set the channels and read channels - stroke engine real Veristand would be able to do this?
Thanks in advance for your answer.
Hello
I had the same issue using VeriStand 2011 here is the link: http://forums.ni.com/t5/NI-VeriStand/license-for-gateway-usage/m-p/2584077#M3156. But maybe the police changed?
Best regards
Tags: NI Products
Similar Questions
-
A USB from a PXI power control, turn the engine in real time
Hello
I need a USB of my target in time power control real (PXI) who installed the engine time real Labview (no windows installation).
If I'm not mistaken, this is not possible with the USB port on the controller (NI PXI-8108) that I have not installed windows to recognize the device. As far as I could see, it looks like I need to buy a special card for PXI that allows me to interact with USB devices.
Is there someone who came across such an environment to see if it's the right approach?
Thank you very much
Dani
For those who are interested, in order to control the USB equipment, the following requirements is necessary for a Phar Lap ETS RT OS operating system:
In time real LabVIEW 2011 or higher
VISA, 5.1 or higherhttp://digital.NI.com/public.nsf/allkb/5F30CD20D4D986CC862576CF00748B15
http://digital.NI.com/public.nsf/allkb/ED3790E56FE969F8862575C30076063C?OpenDocument
The upgrade of the system and the second link will allow such equipment.
-
Convert a desktop PC to a target of VeriStand real-time
Hello
I have to convert a desktop PC to a target of VeriStand real-time.
What are the PC requirements to convert the PC to a target of VeriStand real-time? They are the same as the requirements to convert a PC to a time target real LabVIEW?
http://www.NI.com/white-paper/8239/en
What is the procedure to install the engine time real Veristand to the RT PC? Is this the same as the procedure to install LabVIEW Real-time to a RT PC?
http://www.NI.com/white-paper/2733/en/#toc4
And what I have to install engine LabVIEW Real-time before installing engine VeriStand real-time?
Last question: can I install the engine time real VeriStand on a PXI controller - 8115 Windows by creating a dual boot on my own? (PXI-8115 can be purchased with Windows or LabVIEW RT or the dual boot Windows/LabVIEW RT.)
Thanks for your replies.
Best regards.
David
(1) Yes
2) kind of. Neither veristand engine is just an application that runs on the RT or windows. So once you follow this guide to make the target RT desktop computer you can install the NIVS motor application through MAX
(3) Yes. Remember that the nivs engine can run on windows or RT so if the 8115 runs windows, you can run NIVS targeted toward you. If the 8115 runs RT you would need a separate windows PC and target the 8115 from that. Or you could put the hypervisor (if the 8115 supports) to simultaneously run windows and RT on the 8115 and so to run the client side NIVS windows targeting the engine on the side of the RT veristand... About a penalty of 50% of the performance -
I can't install NI Veristand engine RT to LabVIEW RT 2012 2011
Hi all
Since I'm pretty new to this Board, excuse me I'm double questions...

I work with:
System RT: PXI-8135
Software:
LabVIEW 2012
NEITHER Veristand 2011 SP1
NEITHER Teststand 2012
I am currently trying to get my simulation Veristand work correctly. So this means I have to install NOR Veristand Engine to RT target using MAX.
I heard the message (see attachment) when installing.
Question:
Is it possible to install NI Veristand engine 2011 my RT controller that has motor in time real Labview 2012 without downgrading my 2012 LabVIEW for 2011?
Any help would be appreciated...
Thank you
Rajamodol
Hi Rajamodol,
the following document describes the compatibility of facilities of LabVIEW VeriStand:
http://digital.NI.com/public.nsf/allkb/2AE33E926BF2CDF2862579880079D751
VeriStand 2011 SP1 requires a LabVIEW 2011 or 2011 SP1 installation.
Best regards
Peter
-
Analyzers of vector signals OR, in real time of tektronix and tests EMC spectrum analyzers
Normal
021
fake
fake
fakePT - BR
X NONE
X NONEMicrosoftInternetExplorer4
/ * Style definitions * /.
table. MsoNormalTable
{mso-style-name: "Table normal";}
MSO-knew-rowband-size: 0;
MSO-knew-colband-size: 0;
MSO-style - noshow:yes;
MSO-style-priority: 99;
MSO-style - qformat:yes;
"mso-style-parent:" ";" "
MSO-padding-alt: 0 cm 0 cm 5.4pt 5.4pt;
MSO-para-margin-top: 0 cm;
MSO-para-margin-right: 0 cm;
MSO-para-margin-bottom: 10.0pt;
MSO-para-margin-left: 0 cm;
line-height: 115%;
MSO-pagination: widow-orphan;
font-size: 11.0pt;
font family: 'Calibri', 'sans-serif ';
MSO-ascii-font-family: Calibri;
MSO-ascii-theme-make: minor-latin;
MSO-hansi-font-family: Calibri;
MSO-hansi-theme-make: minor-latin;
mso-fareast-language: EN-US ;}1. how to work if vector performance of or
Analyzers of signals compare to Tektronix real-time spectrum analyzers?2 can you emulate Tektronix FFT
processing overlapping?3. is it possible to use vector of NOR
Analyzers of signals of compliance EMC and/or test preconformite? Is there some
companies use it successfully? Need a special or custom software?Thank you
Hi emc2006
I'll answer your questions separated by your topics:
1 - What is the factor that you want to compare between these two products? In the link below, you will find the performance of the NI PXI-5660 RF Signal Analyzer system.
2. you can develop this feature of programming in software Application development, i.e. of LabVIEW.
3. Yes, NI´s vector signal Analyzer could run preconformite or EMC compliance analyses. In the same link below, you will find in the subdivision of Applications.http://zone.NI.com/DevZone/CDA/tut/p/ID/4298
Concerning
Napoleao
Application engineering
National Instruments -
Rotary decoder in real-time and 'pulse shifter '.
Hello world
I'm putting in place a rotating decoder for use as a shifter of pulsation by labview real-time.
Basically, this means I have two input channels (ttl-legumes, ~ high 20us) rotary engine. A channel contains a pulse at each CA (angle cranc) ° up to 12 kHz (increment). The other channel contains a pulse every 720 ° CA (the charge cycle, BDC_cc low break-even point). With this information a pulse to be generated on an output also channel ttl (high), which triggers my setup of measurement. This impulse must be moved in a programmable relationship to the entrance of BDC_cc, which aims at a table of regular measure.
I got it running by streaming the channel of BDC_cc until a rising edge is detected, then count the edges of increment to the designated trigger point and then generate a pulse on the output channel. The problem is that the late 70-120us exit trigger. In short it's too; a maximum error of ~ 20 is acceptable. Digital channels appear to work faster, so I put discarded Counter-based acquisition.
I'm quite new to LabView, so I'm sorry if the answer is obvious...
My purchase setup consists of:
PCI-MIO-16-1
BNC-2120
LabView 12.0
Max 5.3.1f0Widows XP
This configuration seems to exclude some options Labview offer, such as the external digital acquisition sampled or externally triggered by the acquisition in the base. A manual interpretation of analog inputs is way to slow.
I have attached my working version.
Any input appreciated woud...
John,
I only have a minute right now, but think I can play with a device simulated tonight or tomorrow.
I'm quite sure that there would be a clean solution clocked by material if you use a series M or X-series
Council MIO, but the older generation counters timers on the set of the E series do support everything which
You need. It's been a while since I had to rely on this generation of hardware.
I think the basic approach is to use the lunatics of angle as the clock pulse train that defines the
delay time of the pulse you want to generate. You could be "Timer" the pulse based on the real
angular position, helping you synchronize to a specific angle of crank. The question is whether and how E-series
counters of takes to support the generation of pulses triggered (or redeclenchables). If they are not, I would say that you consider
get new hardware DAQ which support this kind of trigger and you give a very precise pulse
implementation.
-Kevin P
-
Error-307650 during a sequence in real-time with API LV
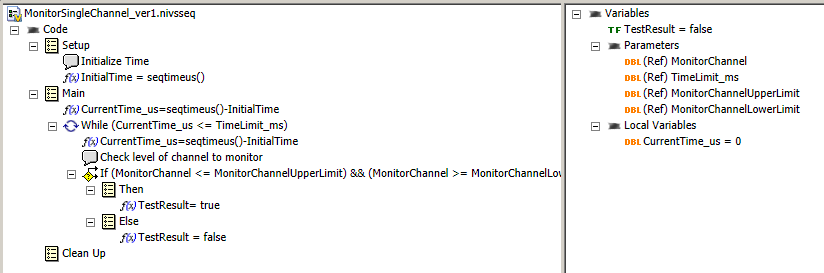
I created a basic real-time sequence that checks the time it takes a signal reach a certain threshold.
On the side of the LV, I use the API to call this sequence. I make sure that all channels and settings are defined as in the examples. However I get 307650 error that says "NEITHER VeriStand: Index was out of range." Must be non-negative and less than the size of the collection.
' Parameter name: index.
Any suggestion to help here? THX. Code is attached.
There are two problems here:
1. The Stimulus profile editor is not indicating that there is an error with this sequence, although there is a. Note that the variable InitialTime is used in an expression, but is not declared as a parameter or a local variable.
2. you get an error at runtime because of it, but it's not terribly useful (index out of range).
You can fix this by adding a local variable of InitialTime to your sequence. I dropped the CAR 338386 about this bug.
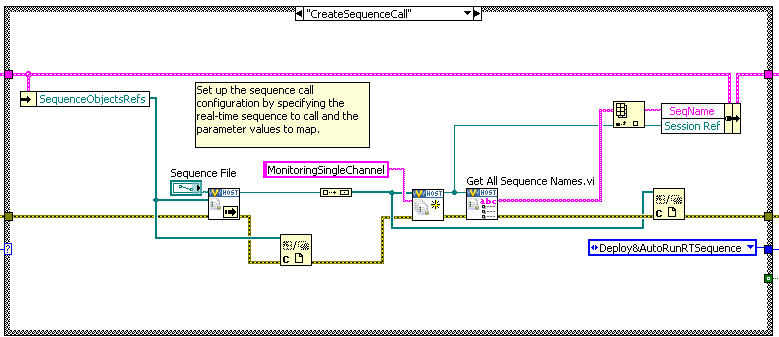
Once you do this, there is something extra, you will need to set in your VI which runs the sequence so he could get the results of the sequence properly. You use correctly the value of the sequence name to read the back of the sequence Variable. You use the Session name used during the deployment of the sequence. Which does not match the name sequence.
To get the name of the sequence, use VI to get all the names sequence on your session profile of stimulus to get the array of names for all of the top level of the session sequences, then index on the first point, given that you only use a single sequence. Example below:
-
UDP playback does not work on a real-time target
Hello
I am running LabVIEW RT 8.6.1 on a PXI 8106 RT controller. LabWindows/CVI for RT 9.0.0 execution engine is also installed that I develop using LabWindows/CVI 9.0. I'm trying to send some data UDP for an external PC via the network for software running on the controller, but this does not work. The UDP packets are certainly get sent (I receive on my PC when the transmitter to reconfigure my PC IP address) but the UDP callback function is not called. The call to CreateUDPChannelConfig returns OK. Here's the (very simple) code that I wrote based on the example of reading NI UDP:
#include
#include #include // Global variables static int reader_channel = 0; // Global functions int CVICALLBACK UDPCallback (unsigned channel, int eventType, int errCode, void *callbackData); /// HIFN The main entry-point function for the Real-Time DLL. void CVIFUNC_C RTmain (void) { int errno; if (InitCVIRTE (0, 0, 0) == 0) return; /* out of memory */ // Create UDP receive task errno = CreateUDPChannelConfig(49152, UDP_ANY_ADDRESS, 0, UDPCallback, NULL, &reader_channel); while (!RTIsShuttingDown ()) { SleepUS (1000); } CloseCVIRTE (); } int CVICALLBACK UDPCallback (unsigned channel, int eventType, int errCode, void *callbackData) { static int udp_received = 0, default_rx = 0; switch (eventType) { case UDP_DATAREADY: udp_received++; break; default: default_rx++; break; } return 1; } All that happens is that software is just waiting for the callback to be called (which never does). I found this ad that described a similar problem, but the developer was using LabVIEW and although he has found a way round the problem, he was never heard as to why it worked.
Thank you
Martin
Hey,.
Although the problem is now resolved, I thought that put the code for others see if the same error is encountered. The modified code is tested and works. It is saved as an attached png file.
-
Why won't my installer in real-time?
I'm using labview 8.51. I have many addons on my machine including DSC Vision FPGA and RT. I have an application which usis daq mx and the imaq and imaq-dx (no vision saw. I added 8.51 engine performance, NI-Imaq, NOR-Imaq-dx, Max 4.1 and Daqmx8.7. I run the installer, but he still wants the disk in real time. This application uses no screws RT and should not waqnt this disc. What triggers this action and how I can avoid it. I have had this problem several times and can't seem to find one alternative that the shipping of my separate installers (I hate this solution).
Hi Paul,.
Just to clarify, you have no need to manually copy the CD on the hard drive, like the LV application builder automatically only record it is necessary if you check the option "cache" during the construction of the installer. Please see this thread for more information on why Builder app works this way: link
Kind regards
-Wes / NOR
-
RT - set the time of real-time target in MAX
Hello
I want to manually change the time on my target in time real (cRIO-9022) with MAX
I followed the steps described here.
In step 2, when you install the remote system OR 14.5.0 Configuration Support
I get the following error message when you try to install:
"Labview real-time 12.0.1 requires the service locator 1.0".
On the host computer, I had SP1 2013 Labview with the module time real 13.0.1
On the cRIO, I'm under Labview RealTime 12.0.1
I installed SP1 2012 Labview real-time Module on the host computer and tried 12.0.0.
Then, I received this message:
"Remote Server for Labview RT 13.5.0 requires Appweb 13.5.0
Engine for Services execution Web 13.5.0 requires NEITHER System Web Server 13.5.0
LabVIEW Real-time 12.0.1 requires the service locator 1.0 ".
I searched the forum with no luck
Any help I appreciated.
BR
Arne M
Hello
I solved the problem.
Just had to select the correct versions of all additional software necessary
Support remote Configuration OR system 5.6.0 etc..
-
build a real-time application failed
When I Isaiah to compile my application in real-time in order to deploy it in a device crio, it fails. I can run very well by opening it and clicking run. It can deploy and run all day in this way, but he needs the computer that much too. So I need to be able to build and deploy. When I do a preview of the generation, it complements very well with no error. I put the program I want to launch the start and my folder virtual subVIs always include. It is a typical procedure for deploying projects on the crio.
When it crashes, I get an error:
The build failed.
Possible reasons
An error occurred during the recording of the following file:
C:\Program NIUninstaller Instruments\LabVIEW 2009\vi.lib\rvi\ClientSDK\Core\ModuleGeneration\CommunicationInterfaceUtility\niFpgaDmaChannelImplementation.ctl
Invoke the node in AB_Source_VI.lvclass:Close_Reference.vi-> AB_Build.lvclass:Copy_Files.vi-> AB_Application.lvclass:Copy_Files.vi-> AB_RTEXE.lvclass:Copy_Files.vi-> AB_Build.lvclass:Build.vi-> AB_Application.lvclass:Build.vi-> AB_RTEXE.lvclass:Build.vi-> AB_Build.lvclass:Build_from_Wizard.vi-> AB_UI_Frmwk_Build.lvclass:Build.vi-> AB_UI_FRAMEWORK.vi-> AB_CreateNewWizard_Invoke_CORE.vi-> RTBUIP_CreateNewWizard_Invoke.vi-> RTBUIP_CreateNewWizard_Invoke.vi.ProxyCaller
Method name: Save target: InstrumentI put in a request for service (reference #7259553), but I'm just not getting help fast enough. I'm on a real deadline here and I expected just kind of request of manufacturer to work as she has always done. I have done this a million times with other applications and never had a problem like this.
Thanks in advance for your help guys.
With the great help of sales engineer Will Schoettler, we were able to solve the problem.
1. first of all we tried to create a new project from scratch file, add all the files and the fpga of the compilation. Same mistake.
2. then we made individual buildings deploy each Subvi individually to see if one of them was the cause of error. Each built without problem.
3. I tried to create a new generation of program main crio and tweek the settings. Rather than manually adding the Subvi and variable to the section "always include" the compilation option library folder, I simply added the main VI to the list of startup programs and would make LabVIEW to understand what screws to add. For some reason, this gave me a more verbose error explanation and gave the following reason as the last sentence of the explanation of the error
"Due to limitations of the operating system, LabVIEW cannot create the file because its pathname contains too many characters."
I moved the project to the c: folder /, fixed broken in the project references, and he built the VI and deployed it is fine.
The constructor creates a directory with a very long path name in your project file, so if you have your project folder deep in your directory tree, it will attempt to create files with paths for windows too big to manage.
Mad Kudos to Will Schoettler engineering app for such a powerful and complete troubleshooting task list to try things which lead me straight to the solution. I'm glad it was something so simple and not a form of file corruption or something wrong with my code.
Thanks for trying to help the guy.
-
Hello
I have a compact rio, which has a 4 way frame this chassis is the three modules of ni9234, they are related using FPGAs for application in real time, then using shared variables in the low-speed loop associated with a slave modbus to communicate with the domain controllers, the nor 9234 accelerometers linked to them with option ac coupled iepe on c modules , my problem is the real-time application seems to work well even when power loss occurs it restarts without problem and the fpga written hard disk portable bin files very well, but without an accelerometer connected I get readings of low noise as soon as I connect an accelerometer to one of the outputs 10 it just goes to a fixed number (0.03125) as soon as you unplug it again He returned to readout noise, I ran a scan on the modules and get only a spike when I connect or disconnect the accelerometer, I tested voltage at the pins on the module and I get 22 volts CC which makes it more likely that the material is not the problem, but software is perhaps the cause to hang up, I join the project and files for your perusal. I also realized a new project which, in mode directly linked scan has the module entry in the shared variable and the scenerio even once again. Help would be appretiated.
Thank you very much
Jason
Whren using waveform with the 9234 acquisition, we recommend the following FPGA and RT model.
http://sine.NI.com/NIPs/CDs/view/p/lang/en/NID/209114
It can be extended as a datalogger with:
http://zone.NI.com/DevZone/CDA/EPD/p/ID/6388
or using shared variables combined with the analytical engine
http://zone.NI.com/DevZone/CDA/tut/p/ID/9851
The FPGA in all this, as well as the framework of RT have used successfully by 1000s of users. I recommend giving these a try.
-
Deployment of local variables shared on a real-time target
Hello everyone, once again
I read more posts and knowledge base articles about this topic than I can count at this point, and I'm scared, I'm still not clear on exactly how it works, and I hope that someone can delete it for me, if it is to earn themselves some laurels more.

I have a project with a real-time quote and the other Windows. They shared communication via network-published variables. The real-time part also uses shared single process variables to communicate between the loops. I have the intention of all 3 libraries of shared variables (Windows-> RT, RT-> Windows and RT Local) to be hosted on RT target for reliability. Real-time executable must start at startup and run even if side Windows is not started (on the side of Windows is optional).
I realized that real-time executable will not start the variable engine shared and/or deploy itself shared variables. I also read that I can't deploy the shared variables programmatically from the side of RT. This leaves only two options that I know of:
(1) their deployment programmatically in Windows-side program.
(2) deploying the shared variables on the target RT manually via the project in the LabVIEW development environment, and
About option 1, as I said running Windows is supposed to be optional, so you have to run a program on the Windows side before the side RT will work is highly undesirable. Moreover, even if I do a little "Deploy shared variable" application that runs at Windows startup, I can't guarantee that it will work before start of the side RT executable will run. In this case, the executable file RT will fail due to not having the variable engine shared running? If so, and side Windows, and then starts the engine / deploys the shared variables, the side RT begins to work automatically? If not, is it possible to trigger this restart of the Windows startup application side?
Also, I just read everything and tried the option to build to deploy variables shared in the application of the side Windows. Not only that my RT shared Local Library variables not listed as an option (given that the application of the side Windows does refer to it in all for obvious reasons), but when it deployed two other libraries at startup, the program side of RT (which was running in the development environment) stopped. I'm not positive that would happen even if he was running like a real executable file, but it is certainly enough to make me nervous. I assumed that the library is not listed may be resolved by including a variable network-a published in the local library of RT and including the app side Windows.
About option 2, I don't understand how I'm supposed to deploy my libraries shared variables without stopping the execution of the startup on the target real-time application. Once I did, the only way to restart the application of the RT is to restart the computer RT, correct? In this case, I just undid all the interest to deploy the shared variable libraries? Unless libraries remain deployed and variable motor shared running even after restarting the computer of RT, which would solve the problem I guess. Certainly, I would like to know if this is the case.
However, option 2 is complicated by the fact that when I manually right-click on any of my shared variables libraries and select "Deploy" or 'Deploy all', libraries still do not appear in the Manager of the distributed systems, even after clicking Refresh several times, on the local system or the target system. The only thing that shows up, on both sides, is the Group of 'System', with FieldPoint, etc. in it. The same is true when I run my application in real-time in the development environment, even if the shared variables are clearly working, as I mentioned earlier.
So, if you have done so far through this mammoth post, thanks! I have three main questions:
(1) are that all my descriptions above correct in what concerns the variables how work sharing?
(2) what is the best way to meet the requirements I have described above for my project?
(3) why shared variables libraries not appearing in my manager of distributed systems?
Thanks for any help you can give on any of these three questions!
-Joe
1. Yes, as soon as you deploy the project the NSV is tranactional. EVS is loaded by MAX when you configure the RT target and begin to operate as part of the boot sequence.
2. you can see anything on your target rt in the DSM?
3. Yes, NSV and EVS are persistent resets.
-
How to transcribe audio streams in real-time text?
Hello
Currently, I listen to a live audio stream voice using Communicator Desktop WAVE on Windows XP. I want to use a voice-to-text application to transcribe this audio in Word or Excel in real time. I'm looking to reproduce the same experience as the direct subtitles on TV. I read that Windows is a speech recognition software and there are also 3 application of the part such as Dragon NaturallySpeaking. Is it possible to what I can achieve this?
Thank you very much
dambk.
Hello
The speech recognition software is not transcribe audio voice to text.
You can search in your favorite search engine for the voice to transcribe text software.
Note: Using third-party software, including hardware drivers can cause serious problems that may prevent your computer from starting properly. Microsoft cannot guarantee that problems resulting from the use of third-party software can be solved. Software using third party is at your own risk.You can also visit these links to learn more:
-
I can load the speed in real time?
Hi, guys.
I'm working on my project now. Right now I use PCI 7344, UMI-7764, AC/DC motor sevro, their amplifiers and the camera of the UAB.
I try to repair the braiding point machine to weave leadership x. usually the Plait point oscillates around a point in x direction.
At first, I need to get the position of the point using cam USB, I've done braiding. The positions I got the cam of the UAB is in real-time.
Then, I need your comments the position of the motion control loop. I intend to use the position to calculate the speed that responded to the questionnaire, which is real-time, too.
Engine going this speed. Thus, it is supposed to get that engine will decrease or increase depending on the weaving point moving.
I don't know if we can do it. I have yet found the relative position.
Anyway, thanks in advance. Any idea and the idea is really appreciated.
Guangli
Guangli,
as the camera of feedback is coming from a USB camera and with the during the calculations necessary to analyze the images, the behavior of your system in real-time is probably not very tight. Delays and jitter of the additional movement control operations are probably in the same order of magnitude as the delays and jitter, introduced by processing the image. If it's okay with you, can do the following:
- Load a maximum travel speed and acceleration/deceleration of the values for the axis
- With "Load Velocity override", you can pass the speed between 0 and 100%. Transitions of value axis a velocity to the adjacent spire to the value of the acceleration that you defined before.
- If you need change the direction of travel, you need to use 'Load speed' and 'Motion to start. " This operation is much longer that a speed of loading a substitute value, but in general you should not call this sequence too frequently.
I hope this helps.
Jochen Klier
National Instruments

Maybe you are looking for
-
Satellite Pro R50 - B - feature touchpad does not work
Hello guys,. I have a problem with the touchpad of a Toshiba Satellite Pro R50 - b pssg1e - basically, I can move the cursor, but I can't use it to scroll or anything else. I encountered this problem of first on windows 8.1 and I thought he was not y
-
Hi, I want to know if I can use the output port as input in a 2010 Macbook Pro 15' or how to line it with a microphone. Thank you
-
Why I can't increment a control at run time?
Discover this VI. It's just a picture of DBL I want to use to specify how long a series of zone must be. Can I change a value in the edition, but I can't change when the VI is on! Maybe I'm just brain dead today. This thing behaves poorly for others
-
Windows Vista Home Premium application password at startup upward. No password has been created.
Windows Vista Home Premium application password at startup upward. No password has been created. An automatic update of Windows has been installed just until the computer has been shut down. Any suggestions on how to get around this would be apprec