OS cRIO-9082
Hello
This question is too generic. What to know exactly?
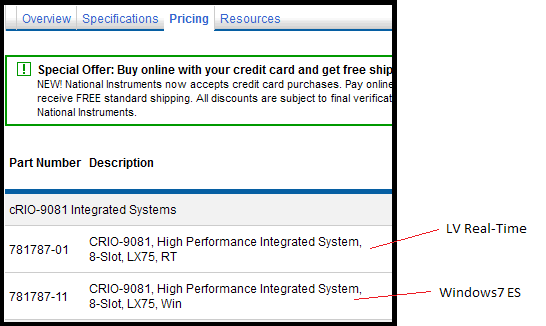
cRIO-9081, 9082 high performance controller + chassi and can be used with WES7 (not in real time) or LV Real - Time OS. The material can be used with any of these options (not both at the same time) depending on what type of application you are think.
http://sine.NI.com/NIPs/CDs/view/p/lang/en/NID/210000
Tags: NI Software
Similar Questions
-
cRIO 9082 - cannot connect through NI MAX/LV
Hi all
I am writing my bachelor on the dynamic memory and the vibration tests.
The project I design an experimental platform used to excite some mechanical components.
We need several sensors (MON, accelerometers, DC motors etc.), we use a cRIO 9082.
However, when I want to connect to the cRIO I can't OR Max, that is I can't set it up. I can see it only in the browser OR (see photo).
I am connected directly to the cRIO via a crossover cable and IPv4 is set to automatically assign the IP address.
Any ideas of how I properly connect to the cRIO 9082.
I'm new on the job with this kind of electronic products, since I am majoring in mechanical engineering - so please keep the explanations as simple as possible ;-)
If you want more details, please let me know.
Thanks in advance.
JZaulich.
Hi Alex,
Thank you very much for your answer.
I had to disable the Windows Firewall as well as the AVG firewall, that did the trick.
Apparently Windows does not allow this type of connection.
After you turn off the firewall, I added the cRIO using the IP address, and it seems to work very well.
Thanks again.
Best regards
Jakob Zaulich
-
cRIO-9082 DMA bandwidth between RT and FPGA
Hello
I would like to know the bandwidth the cRIO-9082 between FPGA and RT DMA? How many MB/s? I can't find the answer on the web page of NOR.
I know that there are 3 DMA channels, but how fast I could send data from FPGA to memory RT?
What is the optimum size of the element in the DMA channel? U8, U16, U32, or U64?
Material: cRIO-9082 RT
Software: LabVIEW 2012, 2012 LabVIEW FPGA
Best regards
Peter
CLA
-
Compilation of LabVIEW FPGA on crash RT cRIO 9082
Hello
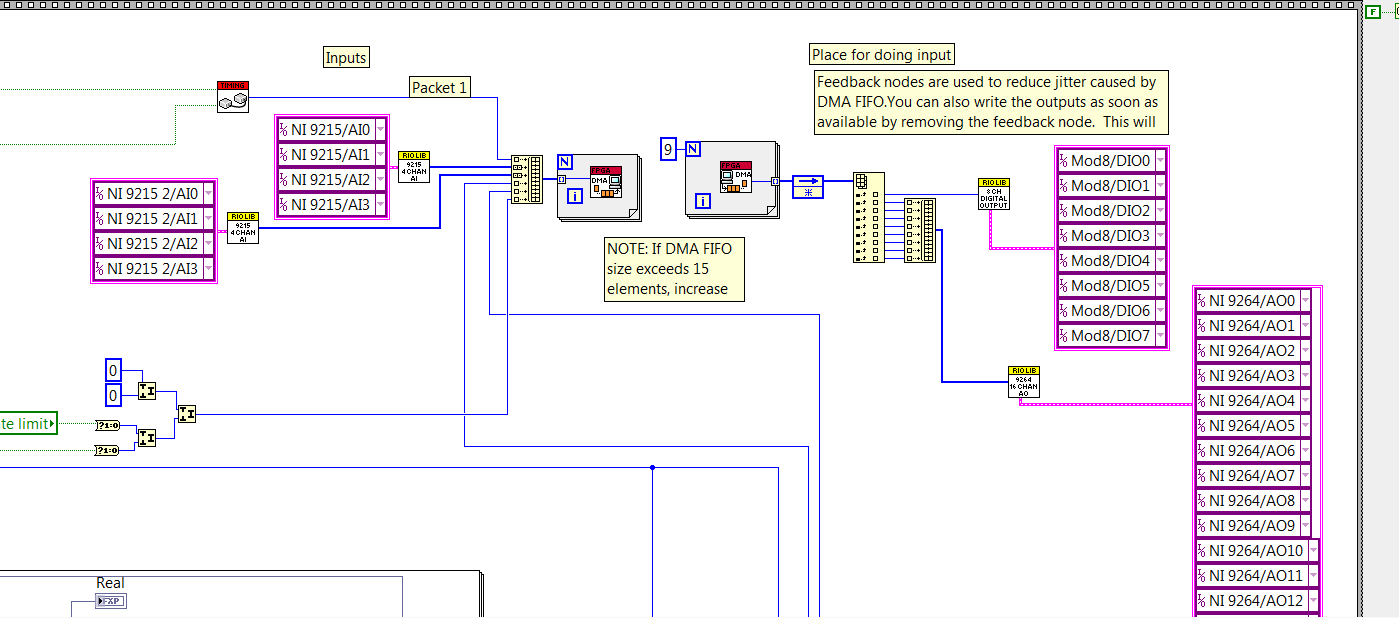
I developed a project of NI VeriStand FPGA (see Project.png) for a target of 9082RT cRIO (which contains 2 cRIO: 9205 & 9264).
I have develop a piece of software code to run it on the chassis of RT cRIO 9082 because I never used this kind of front frame.
The problem appears when I tried to compile the FPGA.
Start the compilation, I see a pop-up (see Msg.bmp) and failed to compile (cf.). Details.bmp).
With the following error, I'm sure that the failure is not because of my code.
Can you help me?
I found the problem that comes from the installation of 2012 more develop.
When the FPGA module and 13.4 Xilinx tools is installed, the DLL 'LIBBz2.dll' (of the NIFPGA\...\Common\nt\Xilinx record 13.4 "is not copied in the following"C:\Windows\system32"folder.
After I manually copied this dll to the "system32" folder, I restart labview and the compilation was successful.
A. Kaszubiak
-
Hello
Is it possible to activate the Frames/packets lying on a cRIO 9082?
Thank you
PJ
Do you use the 9082 with installed Windows or real-time? It makes a difference, because it supports jumbo with Windows frames, but does currently support installed with LabVIEW RT jumbo frames.
-
NEITHER 9401 + cRIO 9082 speed measurement
Hello!
I want to measure a signal rotation with the NI9401 and the cRIO 9082. For the test, I use a signal generator and it is connected to the Mod5/DIO0. In the FPGA, I want to measure the rising edges. (see photo) With them, I'd be able to calculate the number of laps. But my code does not work: counties meter up constantly even I have no signal generator connected. What is the problem?
Thank you in advance.
Best regards
Franz
Hi Franz.
I found no examples in LabVIEW version 2013, but in 2012, you can find them. In general, you can simply download the version as an assessment and get examples. Since I found the examples in a VM youc an discovered the examples attached to this post.
Not to mention that most of the examples are restructuring in the new versions of LabVIEW but general subjects are still there.
Best regards
Christoph
-
Hallo,
I tried to update the BIOS of a cRIO-9082, such as recommended by NOR (desciption are using the info code cRIOReboot).
I followed the instructions, but after that the BIOS updated processes, the cRIO is not able to start more.
So, I'm stuck. Anyone has a suggestion how I can solve this problem?
Thanks in advance
Stone
--> The CRIO-9082 is RMA
CLOSED
-
nismECATAdapter.dll not found error - cRIO 9082 RT
Hello
I'm a real-time 9082 cRIO system deployment. During startup, the console displays the error above, but I can't find anything referring to this dll online. It is as if it does not exist. My best guess is that it's an adapter of EtherCAT OR? Here is the full output to start the Console:
----
Datalight Reliance v2.10.1053
Copyright (c) 2003-2006 Datalight, Inc..Executive in time real LabVIEW
Construction time: 5 June 2014 14:22:59
(C) copyright 2002-2014 National Instruments CorporationMAX system identification name: Chassis1
LabVIEW time real SMP kernel: processor cores found: 2
The initialization of the network...
Dev | Op M | Link | Pilot | MAC address | /Mask IP address | Mode of the adapter
* 1 | Int | U | i1000e | 00802F17EE7A | 10.0.1.241/24 | TCP/IP (static)
Dev | Op M | Link | Pilot | MAC address | /Mask IP address | Mode of the adapter
2. Int Jolie; nigev | 00802F17EE7B | - -| People with disabilities
Time synchronization source: TPP now active
00802F17EE7A device is now connected
System Web server started
Application Web Server launched
Error! nismECATAdapter.dll not found! (dependency)
SoftMotion Module initialized.
OR Scan Engine initialized.
NOR-RIO 14.0.1 server started successfully.Start application: c:\ni-rt\startup\startup.rtexe
NI-VISA 14.0 Server started successfully.
Welcome to 14.0 LabVIEW Real-time
--
I hope that someone out there has seen this before dll?
Thank you
Looks like you need to install the driver the cRIO EtherCAT or your system. Here is a link to EtherCAT for Windows driver: OR-Industrial Communications for EtherCAT 14.0 - Windows
-
CRIO of deployment plug-in missing 9082 and NI 9514
Hi all
I am trying to use deploy a 9514 C module that is installed in a cRIO 9082.
I would like to get access to the interactive test Panel, but every time I try to do it won't let me not deploy the unit.
I get an error as follows: "LabVIEW: (Hex 0x80DF001E) could not find the plug-in for this deployment item.» Make sure that the appropriate software is installed. Deployment is completed with errors", that leaves me unable to access the test Panel.
I have 2012 LabView and NI RIO 3.3.0 installed. Also, I tried to update the firmware on the 9514 itself using LV without modification.
To see the software installed on the cRIO, see the image as an attachment.
No idea what I'm doing wrong?
Best regards
JZaulich
Hi Jakob.
Thank you for this test. Versions of the software now matches our documentation. I looked in the documentation, and that should be all you need. Unfortunately, that didn't solve the problem.
However, I found an old service request about a similar problem, where the solution was to install the driver OR Motion. According to all the literature I found, it shouldn't be necessary, but I can try you?
http://www.NI.com/download/NI-motion-8.5.1/4355/en/
After installation, you must also install the driver on the RIO using MAX.
-
NOR does still cRIOs based on Windows?
Hello
I have a customer who wants only a small embedded PC that does the following:
- Acquire data through a system of 3 rd-party over TCP and store them on disk
- Show a video stream (and capture photos) a GigE camera
- Drive a servo motor 2 axes
- Launch the Windows 3 rd-party software
The only part of the system that must be in real-time is the motor controller. It is also the only part that needs physical i/o; everything meets with your PC via TCP.
The PC and other equipment must be installed in an industrial portable to take to different mining sites. The customer is happy to provide an external monitor, keyboard, and mouse.
I thought that a chassis cRIO running Windows would be perfect for this job. The FPGA could drive the motor and check the limit switches, while the side Windows would do the rest (save data, capture videos images via IMAQdx, run the software 3 rd-party). However, only focused cRIOs on windows, that I could find are the cRIO-9081 and cRIO-9082, which are considered to be 'old' and have too much C-series slots. OR recommend the NOR-9039 instead of the cRIO-908 x, which does not support Windows...
Issues related to the:
- Is it possible to run Windows on a non-traditional cRIO, 4 slots?
- Can you think of an alternative solution to meet the needs of my client? I have considered the following:
- A system PXI, but which does not fit in the box.
- A touchscreen computers for the part Windows + a cRIO RT separate to drive the engine, but the box has no space for a touchscreen.
- A mini PC for the part Windows + a cRIO RT separate to drive the motor, but I'm not sure of the strength of the mini PC.
- A cDAQ for the part Windows controller + a cRIO RT separate to drive the motor. It's possible, but wastes a lot of locations of the C series.
- A controller cDAQ to make, but I don't know if Windows can handle fine motor skills.
Any ideas would be very appreciated. Thank you!
All course cRIOs use Linux RT.
You should probably have a look at the CVS-1458. It is an on-board with GigE Vision system built in. There is a version of Windows Embedded 7.
You can also consider a 9147 OR for the motor control. It is officially called an Ethernet expansion chassis, but Windows can communicate directly with it using something a bit like shared variables. This chassis is just an FPGA (no RT).
-
Installing the software on cRIO for Application of Vision
Hello people, OR
I'm working on a vision cRIO-9082 real-time application that uses. I installed Labview Professional 2011 on my host (default Installation) and configured my cRIO in MAX. The most recent site NI OR-RIO 12.0.1 pilots were intalled on my cRIO.
I decided to start dumping a small application on my cRIO as suggested in the document below
http://www.NI.com/white-paper/10867/en#toc2
through this document, as shown in step 2, I do not have Born no matter what server OR-IMAQ or NOR-IMAQdx RT on my cRIO. I called SUPPORT and they advised to reinstall the development vision with custom module by selecting these two drivers. But during the installation I found no option to select these determinants of the RT.
Are these drivers for real-time vision applications are already included in my NOR-RIO 12.0.1 or do I still need to install separately? I did not camera ethernet at the moment to check if crio works or not. In the license manager I see LabVIEW RT is installed and enabled
My cRIO is ready for dumping a program and vision applications?
Host: LabVIEW Professional 2011 SP1 development system
Target: cRIO-9082 with NOR-RIO 12.0.1
Concerning
Neo
Yes, that's what I thought.
You have the recommended software stack (RSS) installed - you will see the mention of "modules" when using an RSS feed. You must perform a custom installation that the document you specified. When you go to install the software in MAX, on the FIRST SCREEN EVERYTHING (after the launch of the software installation wizard), you are presented with a number of options - you probably just click on ' NI RIO 12.0 - November 2012 "by default because it has a Ribbon of gold next to him. Don't, don't. Click on "custom software". You will get then a word of setting warning something like: ' don't do that if you know what you are doing "-If you don't get the warning, you know that you are not right.

Once you cross, LabVIEW Real-time and so on probably will be selected (as you have installed an RSS feed), but the options of your choice (that is, the components of the Vision) will be visible.
-Danny
-
HY to you all. I'm trying to deploy my project Veristand on cRio 9082, but I still have the same error: "61060 error to Window.lvlib project
 Project Window.vi > Project Window.lvlib:Command Loop.vi > NI_VS Workspace ExecutionAPI.lvlib: NI VeriStand - connect to System.vi.
Project Window.vi > Project Window.lvlib:Command Loop.vi > NI_VS Workspace ExecutionAPI.lvlib: NI VeriStand - connect to System.vi.I see it can be linked to the write DMA size, and I don't know if I'm doing this correctly. I attacched a photo on my vi.
Thanks in advance!
I got it by my self... The error was not there...
-
DC motor control - axis of movement back
Hi all
I am currently (trying) to design a control of a servomotor system.
I use a cRIO 9082, NI 9514 C-module, a servo-drive Kollmorgen AKD and a Kollmorgen servo.
My main goal is to make the engine during continuous running + 15 deg to-15 degrees and with varying frequencies.
I checked my system using the 'straight axis' operation - example, that comes with LabVIEW.
How do I start making a model more sophisticated movement?
I modeled the DC motor in MatLAB using PID control. I can do something similar in LabVIEW?
See the image as an attachment to the model of behavior, that I want to accomplish.
Thanks in advance.
Best regards
JZaulich.
Hi JZaulich
You will need to use the NI Control Design and Simulation module to perform the simulation and model of different systems.
http://sine.NI.com/NIPs/CDs/view/p/lang/da/NID/209850
If you install this kit there are a good example called "DC speed control Cascade" engine that can show you how to model the motor and continuous control (both speed and current ". There are also examples of servo control.
Best regards
Anders Rohde
-
nor - rt.ini RTTarget.OlsonTimeZone = "IS"
Hi all
I'm working on a small client/server application that I can run on the target RT for letting me set the date, time, and time zone for the purpose of RT. I went down the date and fine, but I'm curious to know how to correctly set the zone information in the file of ni - rt.ini on the target (cRIO-9014).
It seems to be two keys (redundant?) for the time zone in the ini file, these are found in the section [LVRT] and are:
RTTarget.OlsonTimeZone = "IS"
RTTarget.TimeZone = "EST5"
I had never heard of the Olson time zone so I Googled, but according to wiki all country codes are two letters (ie. There is no 'IS' defined in the list, or at least not as IS)...
So my question is this:
Y at - it an easier way to get a list of time GMT-shifts with the correspondent "OR flavor" of "OlsonTimeZone" that the RT is expected and also the 'time zone' "ABCx" tag?
(Easy to change time zone in max manually, by restarting and check the file for all the different time zones available).
Thank you!
Q
It is recommended that you use the API of the system configuration OR it took to resolve this kind of things on your target, in the case where in the future, define Olson timezone information (and whatever else you might not have found). From LabVIEW RT 2011SP1 (which corresponds to the more late-and-more current), we do not use this setting on the target and it is not necessary to be there - right now the system OR Config API puts on target because they work to standardize how to do these kinds of things with "the rest of the community." This does not guarantee that components in the future will not use the Olson time zone information - and require that information be present on the target - in order to work properly.
Unfortunately, your documentation is correct - VxWorks based controllers do not have the ability to set automatic DST setting rules. However, PharLap controllers (including the cRIO-9002 / cRIO-9004 and controllers cRIO-9081 / cRIO-9082) can do. The definition of the DST on PharLap is pretty easy. You must change the following token:
[LVRT]
RTTarget.DSTRule = dm.dw.dd [.dh [.dm]] [, sm.sw.sd [.sh [.sm]]]
This may be quite simple, but you set the d (summer time) and possibly the s (standard time) with this token, setting the month, week and day (and possibly time and minute) that change takes place.
For example, if we were to manually set the United States regulations, rules us DST(3=March, 0=Sunday, 2=Second Week, 2=2AM, 0=0Min) STD (11 = November, 0 = Sunday, 1 = week1, 2 = 2 AM, 0 = 0 Min) would be defined as:
[LVRT]
RTTarget.DSTRule = 3.0.2.2.0,11.0.1.2.0
-Danny
-
Nilvaiu.dll missing when deploying VI
Hello
I have a problem when you try to deploy a .VI on my cRIO 9082.
The .VI is to control the speed of a DC (KOLLMORGEN) motor with a servo-drive.
However, whenever I try to deploy the VI I get the following error message:
LabVIEW: Unable to load the shared library nilvaiu (see attached image).
The dll is present in the tree (see picture) and I just reinstalled the DAQmx 9.x.x.
Anyone has an idea on how to solve this problem?
Help is very appreciated.
Best regards
Jakob.
Hi Jakob.
You cannot use DAQmx on a system of RIO - it's two different drivers for two different platforms.
To clearify what means DAQmx support in real time. You can have a normal desktop computer, running the LabVIEW RT operating system and have a PCI DAQmx card in this computer. In this case, you can use the DAQmx driver in an application of the RT.
9082 a cRIO either run a RT OS or OS Win. I assume you are using the RT operating system. The BONES of RT on the 9082 is Phar Lap ETS, which means you can run .dll files, in the same way, you can run them in Windows. However, it is important to note that while both windows and PharLap recognize .dll file extension, DLLs that are running on Windows may not work properly on the PharLap targets. To understant the complexity of the present, you can read this KB:
How can I check that my DLL is executable in LabVIEW Real-time NI PharLap ETS?
So, that in mind and without knowing your application, you cannot deploy your application for the cRIO. What is the reason for the use of DAQmx code? Which module you want to interface with - maybe we can replace just the API, while you use the pilot of RIO instead?
Maybe you are looking for
-
iPhone 6 s - calls after update to iOS10.0.1
I have a 6 s iphone, I put it to update iOS 10.0.1 and since then, I have problems with the reception or make phone calls. When I make a phone call and the other person answers, I can hear them but they can't hear me. In order to hear me, I have to p
-
iMessage is still not reliable for 2012
Read about the lack of reliability of iMessage, it seems to happen from 2012. The upgrade to Yosemite to 10.10.5 did nothing to make it more reliable? My question is He is sending my computer, but I'm told that a message was sent a text message for
-
is in any way to be notified when a web page is updated
There is a site that sometimes updates one of its pages when there's a special offer. Is there anyway that FireFox can advise you that the page has changed - page "will host" in the background.
-
Satellite A660 - protection of HARD drive utility does not enable protection
Hello I have a Toshiba Satellite A660 1F6, unfortunately the usefulness of Toshiba HDD protection does not enable protection because all the buttons are gray, and when I try to open it, a message appears: "He was not able to set up properly for the S
-
Connection of Skype and reconnection
I just upgraded to the latest version of Skype, and now it just keeps connection and disconnection. I do not mean that she signed me, but my status will be online for two seconds and then, it will go offline and then I'm online again for a few second