myRIO myHub CAN bus
In the week OR this year, there was a company that made a device called myHub who connected on top of the myRIO and provided several USB ports (I think only 3) and a physical ethernet port. This same company has also demonstrated a bus CAN add to communicate via the car standard CAN.
I've done a lot of research, but I couldn't find these products, or the company that makes them. Is there information from this company about these products and their availability?
Hello
I think you're looking for the X [MAY] card listed here developed by a company called Stratom.
I hope this helps
Tags: NI Products
Similar Questions
-
I have two USB-8473 linked together, "CAN_H" to "CAN_H", "CAN_L" to "CAN_L" both are connected to my USE Can Bus. Contact CAN0 to UUT works. Communicationg with CAN1 to works of the object to measure. I get the message to update many of the UUT.
However if I use CAN0 to connect the object to measure and CAN1 as a monitor 'listen only' by using MAX CAN Bus monitor, I see no data at MAX CAN Bus Monitor.
Is there an arbitration that must be configured?
There was a difference between my LabWindows and the LabVIEW program baud rate. One was set at 100000 and one was 1000000. The correct value is 1000000. Everything works now.
-
CAN bus off fast recovery and recovery slow modes
Hello
I know the busoff recovery procedure consists of monitoring the CAN bus up to 128 11 consecutive recessive bit sequences have been observed.
But I want to know what is the bus fast recovery and slow the recovery.
Thanks in advance.
Kind regards
Sagar Joshi
Where you see the terms "broad recovery fast bus" and "slow bus off recovery". As far as I know, the spec CAN define only a single bus out of recovery.
-
Absolute Log Timestamp Converter CAN bus
I'm experimenting with the help of the CAN Bus Log Converter to convert raw CAN bus data to a TDMS file to Signal/value data for analysis.
My understanding is that the timestamp to the Raw features store the absolute timestamp (I checked the timestamps in my CAN messages are absolute), but after passing through the CAN Bus Log Converter, the weather channel seems to show only in the relative time (well... a relative number of seconds).
By looking at the properties of the group or channel, I have the following:
Group:
CANDateTimeStamp - 25/09/2015 10:19:16
POUVEZ stamp - 6.36103091565499E + 10
Time string:
Display format: Digital (it takes not time?)
Minimum: 0
Maximum: 63.40234 etc.
I just started using DIAdem angry and I am currently trying a few things while working through online training.
Hi Sam,
I'm curious, were you angry before you start using tiara or DIAdem because frustrated you? The Bus Log Converter creates a relative time for each message channel, but includes the absolute DateTime offset until a string of human time date readable and a number of seconds tiara. If you add this huge number you mentioned to all layer of time values, and then change the channel of the digital display time display, you will get the absolute DateTime values.
Brad Turpin
Tiara Product Support Engineer
National Instruments
-
Reset of the CAN bus without knowing the reference of the tasks
Hello everyone,
I use the API CAN channel to read data from a CAN bus while at the same time taking measures using other DAQ devices. When my VI throws an error after the CAN bus has been initialized and started, try to kick start my VI will force the init-start CAN VI throw an error because the channel is never allowed.
Is there a way to clean a channel CAN without having a special reference to the wire? Otherwise, how could I solve this problem?
Thank you!
Erik
Hi Erik,
Is the error that you are experiencing from the same service on a regular basis? If Yes, what can be done before adding them to the whole application of error handling, you can add a case structure, use the cluster of error in this function to act as the selector for the structure of the case and add a Clear Channel command to the real case of the structure, followed by an error handler.
Now, that being said, I still recommend using throughout the application, management errors, especially if this will be distributed as an executable file. But for purposes of development, it is perhaps the fastest way to implement a clear failure of the VI function so that it restarts correctly on the next iteration.
Kind regards
-Dave C
-
The CAN bus activity: why can I not see my CAN bus activity using MAX and a NI USB-8473?
I use an NI USB-8473 and Measurement & Automation Explorer on a CAN bus I know works. He does not see as a traffic CAN bus.
Any ideas on how to trouble shoot to find out why this material does detect any signals at all?
DOH!

We've all been there. I'm glad you have work.
-
I work in can bus monitoring and I have a box NI USB-6259. is it possible to read data with NI USB-6259 CanBus?
Thank you very much..
-
Hello
I use a module NI9862 with a CRIO9081 to retrieve data CAN from another device. I have properly the power module and configure the software with all drivers.
My problem is that when I start the "BUS data viewer" under MAX, there is no data. But when I use PCAN with my camera, PCAN find tha CAN data correctly...
Is there a special configuration under Max for the spectator BUS?
(I put correctly rate and pilots the module...)
Hi Vincent,.
Have you tried to navigate to the settings > Interfaces and database settings and set the normal operation setting on subordinate if you CAN port is reserved and used by your application VeriStand when you try to monitor traffic?
-
NI-CAN Bus Monitor still works, but no examples of LabVIEW
I have a USB-8473 on a PC running Windows XP I'm trying to monitor transmissions CAN go to an external device. No matter what settings I select in the Measurent Explorer & Automation, the bus monitor never miss a message and is completely error-free. Using the example "CAN receive error Frames.vi" included with NI-CAN 2.6.2 I get almost 100% error for all settings. I use 125000 baud in MAX and in the VI.
Configuration:
USB-8473
NI-CAN 2.6.2
MAX 4.5.1
LabVIEW 8.6
Any Suggestions?
Thank you
Jim
Do you know what your baud rate? You can use the BTR values to program the SJA1000 with the settings real bit rate baud. The current formula should be the online help.
-
The cRIO serial port can be used for the CAN bus communication?
I would like to order a CVC with a CAN of network device and would like to know if this can be accomplished by using a serial port integrates the cRIO (OR cRIO-9024 in my case). Is it possible, or would need a C Series module CAN?
You need a C Series module. Series and CAN use a DB9, but they do not have the same physical layer.
-
CAN-bus interface on RIO Eval Board
I am trying to use the interface on the assessment board sbRIO CAN. I installed the driver from RIO 101 shipped package, and the "Embeded CAN for sbRIO" functions are now on the range of functions. However when I place a CAN function on the block diagram, a popup appears, and Labview trying to locate a dll called rioembeddedlvapi.dll without success. It is possible to say "Ignore the point" and he gives up and puts the item on the block diagram. Anyone know what is happening here, and whether or not it can just be ignored? Thank you
I was able to solve the problem on the RIO evaluation board to remove and reinstall the embedded RIO CAN package. Something must have been corrupted.
-
PXI-8512/2 XNET CAN stops when bus errors occur on Spadina
Hello, I use the PXI-8512/2 in a noisy electrical environment so I often get errors on the CAN bus. I noticed that often 8512 stops communicate. In my dual port 8512/2, 4, # LED that flashes normally will eventually turn off. However, I have other devices listening on the same bus; report errors, they continue to stay alive. Is there anyway that I can get the 8512 continue to work in the presence of errors? I use the custom device XNET for VeriStand 2009 and do not see the error handling options. In fact, I don't get any notification of errors at all. I just noticed that my incoming CAN stop signals and my leavers have no effect. Thank you.
Hello
You shouldn't have to remove from your devices. Just update the configuration and engine llbs and restart the Explorer system, save your configuration and redeployment. Let me know if you see problems.
(There are new files also copied into the directory of device custom if you want to use the bus monitor function... so you can replace the entire record of the NOR-XNET if it's easier).
-
Hello
I use a PXI-8461 to control 2 CAN bus lines.
When I run the bus monitor to the MAX, both work correctly (frames are coming).
But I lost a day now to try to make the two lines operate in my application.
I call ncConfigCANNet.vi and ncOpen first with CAN0, then with CAN1. ncOpen with CAN0 gives me an objHandle, but when I ncOpen cann with CAN1 after that, I get objHandle = 0 but no error!
(I do not use error entries)
So in my application CAN0 is running, CAN1 finally returns an error when I try to read using the objHandle (s is 0).
I even tried to use the example of NEITHER "Multiples CAN Frame API maps unique DAQmx map Input.vi" with the same effect.
Is there a known issue with this subject?
I use
NI-CAN 2.7.2f2
LV 8.5.1
PXI8461 with CAN0 and CAN1 working with the MAX busmonitor
100g Ritter Sport chocolate / hour
Sorry, my fault.
I was able to solve the problem. My length of read - and write-queue was too big. I was using 100 for each queue. This works for a CAN interface, but not for 2. And, Yes, there is an error message... I lost this error somewhere in the error handling.
Something beautiful that I used for the first time here is the network debug function for the executable files. Really cool and useful.
Detective Conan!
-
[XNET] [CVI2013] Search for the periodic signal CAN
Hello
I use CVI 2013 and the toolkit NOR automobile 1.1 command the diagnostic value.
OR PXI-8513 to edge (2 CAN bus)
I want to know how to check if a periodic signal is currently subject to be sent?
Best regards
Blue
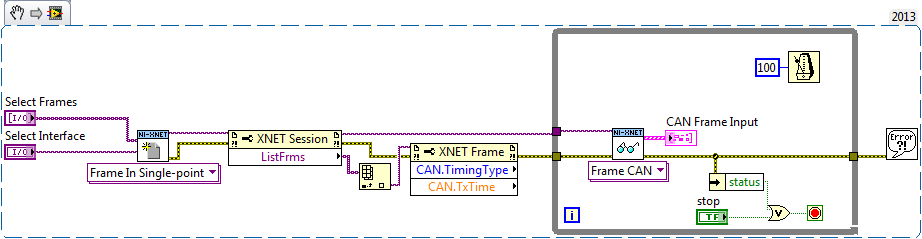
I couldn't find an example of CVI that illustrates the use of the nxGetProperty function to get the calendar type and pass the time of a framework. If I have time Monday I'll try to create a.
In the meantime, I can provide a quick snippet of LabVIEW to illustrate the general idea of how to get these properties of a session reference:
-
Is it possible to simulate a XNET CAN device in MAX?
I ordered one material OR 2 ports 9860-selectable OR XNET C Series Module and 2-wire transceiver capable of CAN - FD. Of course, my time line for implementation is tight. I would like to write the driver I need before that happens the hw. For the many materials OR I can go to MAX and simulate the device. It seems that this option is not available for communication devices series like the one I ordered.
Is it possible to simulate my device in order to create a session and debug my driver?
Thank you
Mick
Hi sherlieferdilus,
There is no way to simulate actual XNET like DAQ hardware modules. For our simulated DAQ hardware, we are able to return dummy data (for example, a simple sinusoid to the analog inputs), but XNET will have something completely different on all buses and behave differently on this basis. More, to use a XNET database for tests must be frames or signals corresponding to the information contained in the database from your CAN Bus.
That being said, OR XNET is fairly simple to use with a large number of examples in our search example LabVIEW for you to investigate and begin to work from. Also, you should be able to start working on your OR-XNET database, if you have not already and that you plan to use a (this is required by all Sessions of XNET except framework flow Sessions). If you are not already familiar with XNET, I would take this time to study some of the examples and take the time to view our material OR XNET and the manual of the software. In particular, learn about the different types of Session and the types of synchronization you can use so that you are already familiar with them once you receive your material.
NOR-XNET Hardware and software manual: http://www.ni.com/pdf/manuals/372840l.pdf
Introduction to NOR-XNET: http://www.ni.com/product-documentation/12375/en/
Maybe you are looking for
-
Hello Im having problems with pop-up adds called Offerz4u. It started when I stupidly installed an application from a movie streaming website. I deleted the application immediately, but the ads are still to come. The ads appear no matter what browser
-
Tecra 8100 did poster need nothing on LCD - LCD cable
Hi, my Tecra 8100 13.3 "laptop does not display anything on the LCD screen. It works with the VGA. I'm looking for a LCD cable for this laptop. Any body know where I can buy one. Any body know what is the part number FRU for this. Not the cable of th
-
Mini Mac missed (and therefore a new!) - how to debug
My mother has a Mac Mini that was old for a few years (running 10.6). It was getting really slow - even open the page of Google base takes awhile, and often he would lose wifi connection completely (even if the icon wifi in the bar menu says bars ful
-
Help! Trying to write an array to a file without having to rewrite the old data each time.
Hey everybody, I have a vi that takes a 2D array and writes to an xml file. The purpose for this is to characterize the pathloss through a matrix dowkey 10 x 10 to different frequencies. I use this program to create a table of correspondence for the
-
data is plotted on the graph of absolute time delay
Hi all I'm plot data on a graph of absolute time and I find 2 hours difference between the data displayed by the debugger (left) and data on the graph (X - SCALE AUTO). The time saved in ptTime, was acquired by using the function 'time' and the PC ha